mees/calvin
A robot benchmark where one sentence is never enough
CALVIN exists to benchmark and train agents that solve long-horizon manipulation tasks specified only through natural language and onboard sensors.
Not currently ranked — collecting fresh signals.
star history
What it does
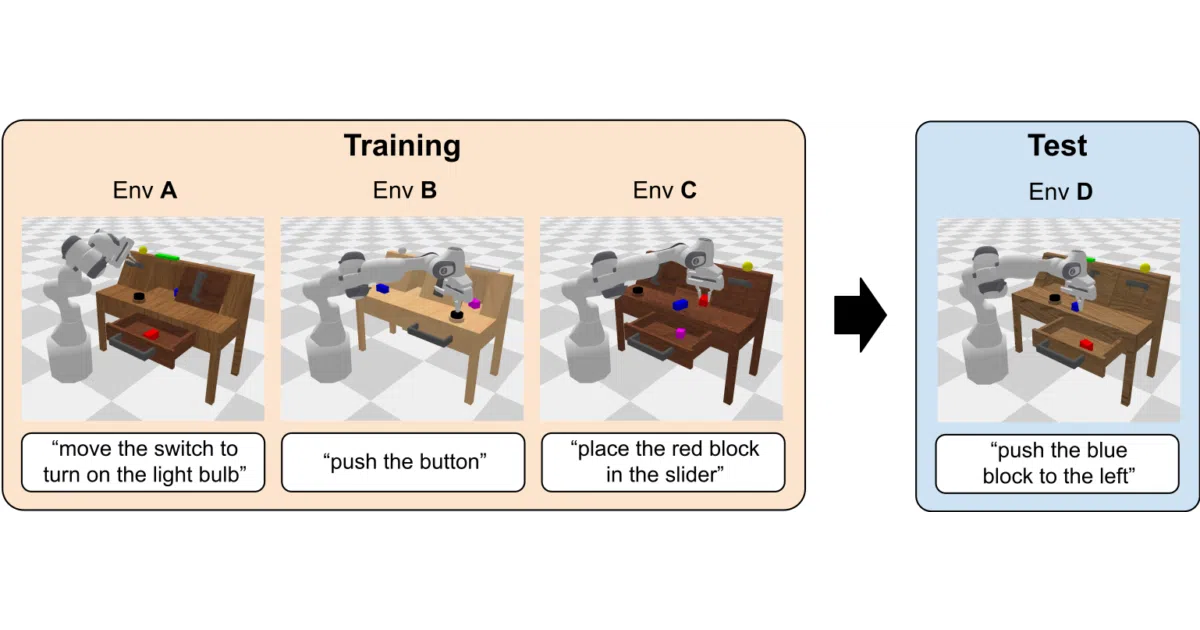
CALVIN is a simulated benchmark for learning long-horizon, language-conditioned robot manipulation policies. It provides a dataset, baseline agents, and evaluation protocols for training a single agent to interpret extended sequences of natural language instructions—such as opening a drawer, picking up a block, and pushing it inside—and execute them via continuous control at 30 Hz from onboard sensors.
The interesting bit
Where most benchmarks isolate single commands, CALVIN tests whether an agent can follow a paragraph of loosely structured physical instructions end-to-end. The platform also lets researchers mix and match sensor suites—from static and gripper RGB-D to tactile images and proprioceptive state—to see how much sensory context actually matters for grounding language in action.
Key highlights
- Long-horizon evaluation where agents must chain multiple language instructions without environment resets
- Flexible observation space: static/gripper RGB and depth, tactile sensing, and full robot state
- Three action representations: absolute cartesian pose, relative displacement, and joint positions
- PyTorch Lightning baseline with Hydra configuration and an optional shared-memory data loader
- Utilities to relabel language annotations with alternative SBert models and reannotate training sequences
Caveats
- Dependency installation can hit a
pyhashissue that requires downgradingsetuptoolsbelow version 58 - The shared-memory training cache needs roughly 20 minutes to prepare before epochs begin
- Single-task evaluation mode is currently only implemented for the provided baseline agent
Verdict
A solid starting point for vision-language researchers who need a challenging, standardized manipulation benchmark; likely overkill if you only need simple, single-step robot tasks.
Frequently asked
- What is mees/calvin?
- CALVIN exists to benchmark and train agents that solve long-horizon manipulation tasks specified only through natural language and onboard sensors.
- Is calvin open source?
- Yes — mees/calvin is open source, released under the MIT license.
- What language is calvin written in?
- mees/calvin is primarily written in Python.
- How popular is calvin?
- mees/calvin has 961 stars on GitHub.
- Where can I find calvin?
- mees/calvin is on GitHub at https://github.com/mees/calvin.