hendrycks/robustness
The benchmark that made "robust" models prove it
ImageNet-C and ImageNet-P are standardized corruption and perturbation datasets that let you measure how badly your vision model fails when reality gets messy.
Not currently ranked — collecting fresh signals.
star history
What it does
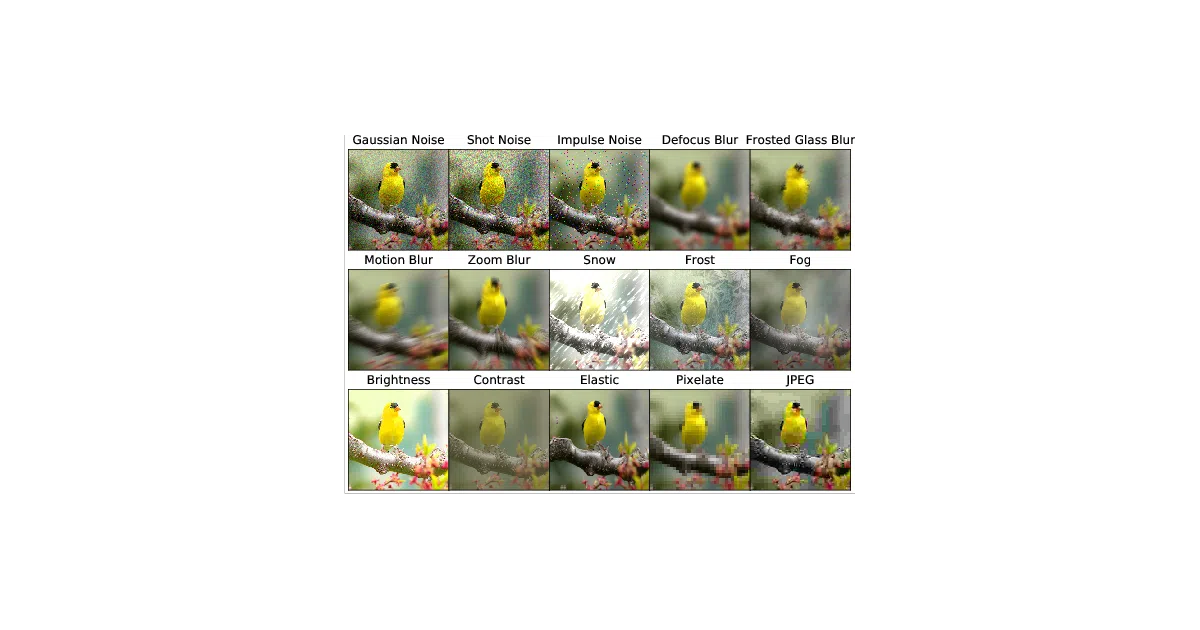
This repo hosts the datasets and evaluation code for Hendrycks & Dietterich’s ICLR 2019 paper. ImageNet-C applies 15 types of corruption (noise, blur, weather, digital) at five severity levels to standard ImageNet images. ImageNet-P applies smaller perturbations over time, producing sequences that test whether models flip predictions as inputs shift gradually. There are scaled-down versions for CIFAR-10/100 and Tiny ImageNet if you lack GPU acreage.
The interesting bit
The README includes a maintained leaderboard with mean Corruption Error (mCE) scores, and it explicitly flags which methods are standalone versus cocktail approaches — a small but unusual bit of honesty in benchmark culture. The authors also nudge you to use their pre-computed JPEGs rather than generating corruptions on the fly, which keeps evaluation deterministic and comparable across papers.
Key highlights
- ImageNet-C: 1000 classes, 15 corruption types × 5 severities, pre-rendered JPEGs for consistency
- ImageNet-P: temporal perturbation sequences (MP4s, not GIFs) measuring flip rates and top-5 distance
- Leaderboard tracks both standalone and combined methods separately
- CIFAR-10-C, CIFAR-100-C, Tiny ImageNet-C/P available for faster iteration
- Requires only Python 3+ and PyTorch 0.3+; evaluation code is minimal
Caveats
- The repo is mostly datasets plus “some code” — the README’s phrasing, not mine — so expect glue rather than a training framework
- PyTorch 0.3+ requirement suggests the core code hasn’t been refreshed for modern versions
Verdict
Grab this if you’re building or evaluating vision models and need a standardized way to argue that your approach actually handles real-world degradation. Skip it if you’re looking for an end-to-end training pipeline; this is a measuring stick, not a toolbox.
Frequently asked
- What is hendrycks/robustness?
- ImageNet-C and ImageNet-P are standardized corruption and perturbation datasets that let you measure how badly your vision model fails when reality gets messy.
- Is robustness open source?
- Yes — hendrycks/robustness is open source, released under the Apache-2.0 license.
- What language is robustness written in?
- hendrycks/robustness is primarily written in Python.
- How popular is robustness?
- hendrycks/robustness has 1.2k stars on GitHub.
- Where can I find robustness?
- hendrycks/robustness is on GitHub at https://github.com/hendrycks/robustness.