traveller59/second.pytorch
The 3D detector that moved on without its repo
An early PyTorch home for the SECOND sparse-convolution 3D detector on KITTI and NuScenes, now officially retired by its own authors.
Not currently ranked — collecting fresh signals.
star history
What it does
SECOND.pytorch trains and evaluates 3D object detectors on autonomous-driving lidar datasets, specifically KITTI and NuScenes. It implements the SECOND architecture using sparse 3D convolutions via the separately installed spconv library. The repo also bundles a web-based viewer for inspecting point-cloud annotations and predictions in a browser.
The interesting bit
When it launched, the project’s main draw was processing volumetric lidar data at 25 fps on a single 1080 Ti while keeping competitive KITTI numbers. These days the README bluntly tells users to migrate to OpenPCDet or mmdetection3d, so the repo functions more as a reference implementation than a living framework.
Key highlights
- Supports SECOND and PointPillars with fp16 and multi-GPU training, though the author notes multi-GPU is untested beyond one card.
- Hits roughly 78.4 3D AP for cars on KITTI moderate difficulty after 160 epochs, or about 78.3 AP in 50 epochs using a “super converge” schedule.
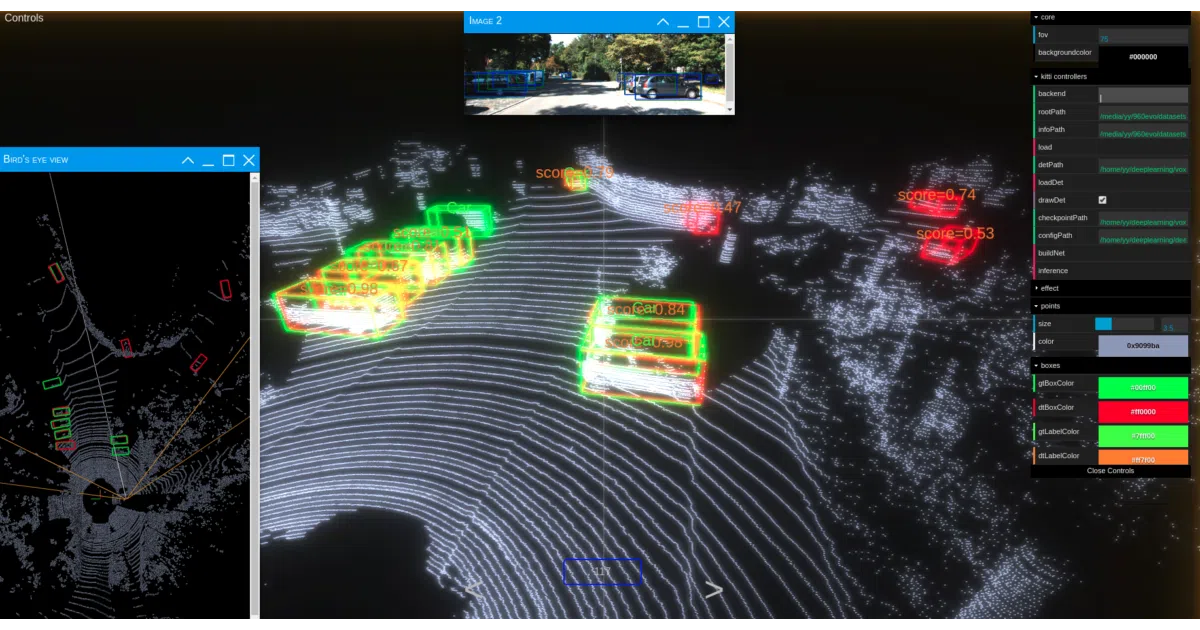
- Includes a web viewer (
kittiviewer/backend/main.py) for browser-based visualization of results. - Pretrained models are available, but the README warns they were trained before a sparse-convolution bug fix and may score slightly lower.
- Explicitly deprecated: the maintainers direct all users to OpenPCDet or mmdetection3d for modern spconv 2.x support.
Caveats
- Tagged 1.6.0 Alpha with a README warning of “many bugs,” unstable configs, and potential spconv API changes.
- NuScenes results are uneven: cars score well, but bicycles and construction vehicles register near-zero AP in the provided validation table.
- Docker support is defunct; the author states they “can’t push docker due to network problem.”
Verdict
Useful if you are reproducing an older KITTI benchmark or tracing the evolution of 3D detection code. For any new project, follow the README’s own advice and use OpenPCDet or mmdetection3d instead.
Frequently asked
- What is traveller59/second.pytorch?
- An early PyTorch home for the SECOND sparse-convolution 3D detector on KITTI and NuScenes, now officially retired by its own authors.
- Is second.pytorch open source?
- Yes — traveller59/second.pytorch is open source, released under the MIT license.
- What language is second.pytorch written in?
- traveller59/second.pytorch is primarily written in Python.
- How popular is second.pytorch?
- traveller59/second.pytorch has 1.8k stars on GitHub.
- Where can I find second.pytorch?
- traveller59/second.pytorch is on GitHub at https://github.com/traveller59/second.pytorch.