tatsuyah/vehicle-detection
Old-school CV that still teaches the basics
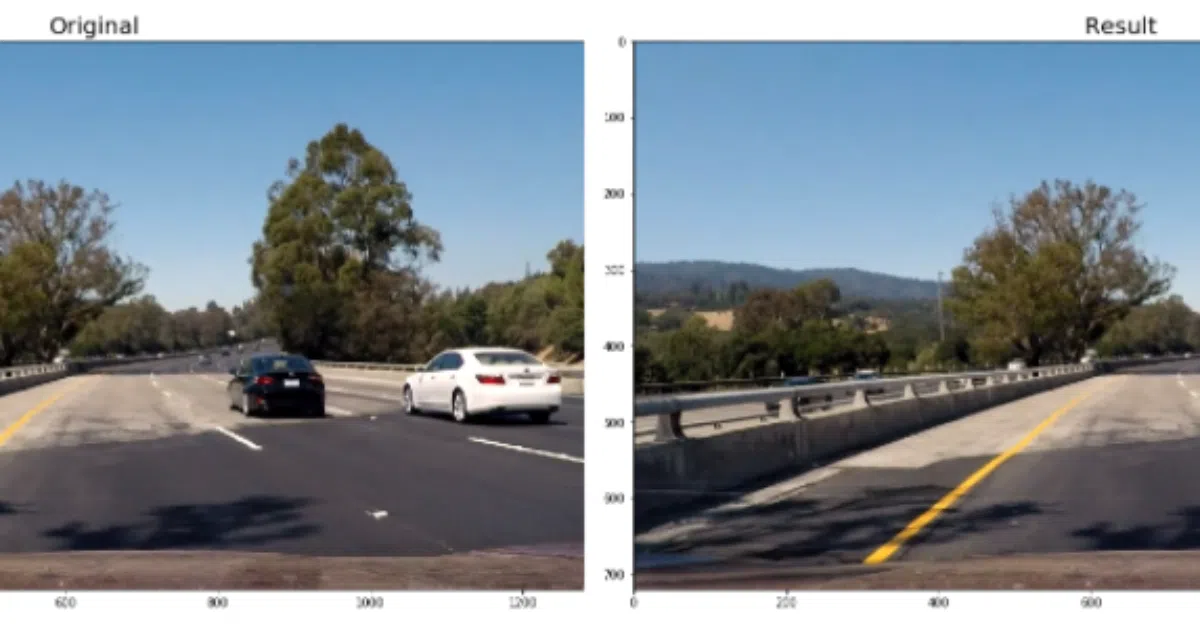
A classic Udacity project showing how to detect vehicles with HOG features and a linear SVM before neural nets took over.
Not currently ranked — collecting fresh signals.
star history
What it does This notebook detects cars in images using hand-engineered computer vision. It extracts HOG features, color histograms, and spatially binned pixels, then feeds them into a linear SVM classifier. A sliding window scans across frames to localize vehicles, with bounding boxes drawn on the output.
The interesting bit This is pre-deep-learning computer vision in its pure form—no YOLO, no ResNet, just gradient histograms and a linear separator. The author deliberately subsamples training data (keeping only 1 in 5 images) to avoid overfitting, which is either prudent or a sign of how brittle feature engineering can be.
Key highlights
- Uses HOG, color histograms, and spatial binning concatenated into an 11,988-dimension feature vector
- Linear SVM trains in ~2.5 seconds on the reduced dataset
- Sliding window search with configurable scales and overlap
- Supports multiple color spaces (RGB, HSV, YUV, YCrCb, etc.)
- Includes a YouTube video demo of the pipeline running on road footage
Caveats
- Requires manually downloading GTI and KITTI datasets; nothing is bundled
- README is truncated mid-output, so final accuracy numbers and inference pipeline details are cut off
- Uses deprecated
skimageHOG parameters that throw warnings
Verdict Worth a look if you’re learning classical CV or need to understand what YOLO replaced. Skip it if you want a production detector; this is coursework, not a framework.
Frequently asked
- What is tatsuyah/vehicle-detection?
- A classic Udacity project showing how to detect vehicles with HOG features and a linear SVM before neural nets took over.
- Is vehicle-detection open source?
- Yes — tatsuyah/vehicle-detection is an open-source project tracked on heatdrop.
- What language is vehicle-detection written in?
- tatsuyah/vehicle-detection is primarily written in Jupyter Notebook.
- How popular is vehicle-detection?
- tatsuyah/vehicle-detection has 1.1k stars on GitHub.
- Where can I find vehicle-detection?
- tatsuyah/vehicle-detection is on GitHub at https://github.com/tatsuyah/vehicle-detection.