qinzheng93/GeoTransformer
Ditching RANSAC for 100× faster point cloud registration
GeoTransformer replaces the RANSAC bottleneck with a geometric transformer that learns distances and angles to align point clouds in low-overlap scenarios.
Not currently ranked — collecting fresh signals.
star history
What it does
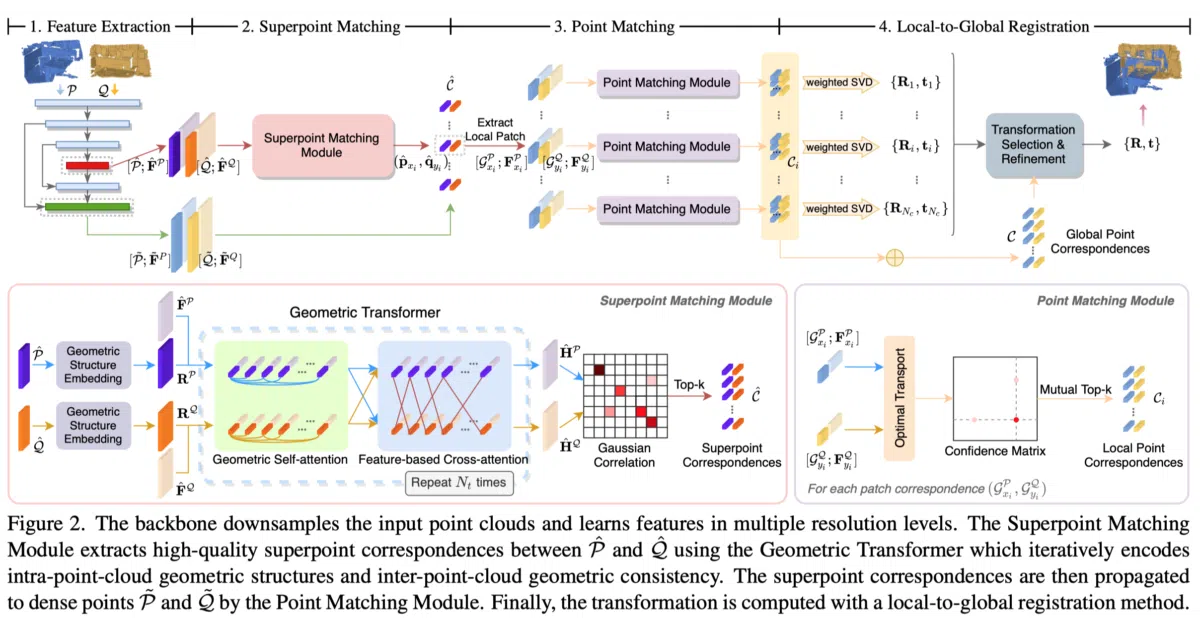
GeoTransformer is a keypoint-free method for point cloud registration. It matches downsampled superpoints by learning geometric features—specifically pair-wise distances and triplet-wise angles—then propagates those correspondences to dense points. The authors claim the matching is accurate enough to estimate alignment transformations without RANSAC, yielding 100 times acceleration over conventional pipelines.
The interesting bit
Most registration pipelines treat RANSAC as unavoidable overhead. GeoTransformer’s superpoint matching is accurate enough that the authors skip it entirely, leaning on geometric invariance baked into the attention mechanism. The trick is to encode structure—distances and angles—rather than rely on iterative consensus.
Key highlights
- Claims 100× acceleration by eliminating the RANSAC stage for transformation estimation.
- Improves inlier ratio by 17–30% and registration recall by over 7% on the low-overlap 3DLoMatch benchmark.
- Rigid-transformation invariant by design, encoding pair-wise distances and triplet-wise angles.
- Ships with pretrained weights for 3DMatch, 3DLoMatch, KITTI odometry, and ModelNet.
- CVPR 2022 Oral.
Caveats
- Multi-GPU training is limited to batch size 1 per GPU because variable-sized point clouds use
packmode, forcing frequent conversions tobatchmode. - Applying the 3DMatch pretrained model to your own data requires scaling to a 2.5 cm voxel size; it is not a zero-config drop-in.
Verdict
Grab it if you need robust registration in low-overlap scenarios and can tolerate research-grade constraints. Look elsewhere if you need flexible batch training or a turnkey solution for arbitrary scales.
Frequently asked
- What is qinzheng93/GeoTransformer?
- GeoTransformer replaces the RANSAC bottleneck with a geometric transformer that learns distances and angles to align point clouds in low-overlap scenarios.
- Is GeoTransformer open source?
- Yes — qinzheng93/GeoTransformer is open source, released under the MIT license.
- What language is GeoTransformer written in?
- qinzheng93/GeoTransformer is primarily written in Python.
- How popular is GeoTransformer?
- qinzheng93/GeoTransformer has 967 stars on GitHub.
- Where can I find GeoTransformer?
- qinzheng93/GeoTransformer is on GitHub at https://github.com/qinzheng93/GeoTransformer.