niessner/Matterport
A 90-house dataset that became an indoor-vision benchmark
Matterport3D is the RGB-D dataset researchers keep citing when they need real indoor environments with depth, semantics, and 3D structure.
Not currently ranked — collecting fresh signals.
star history
What it does
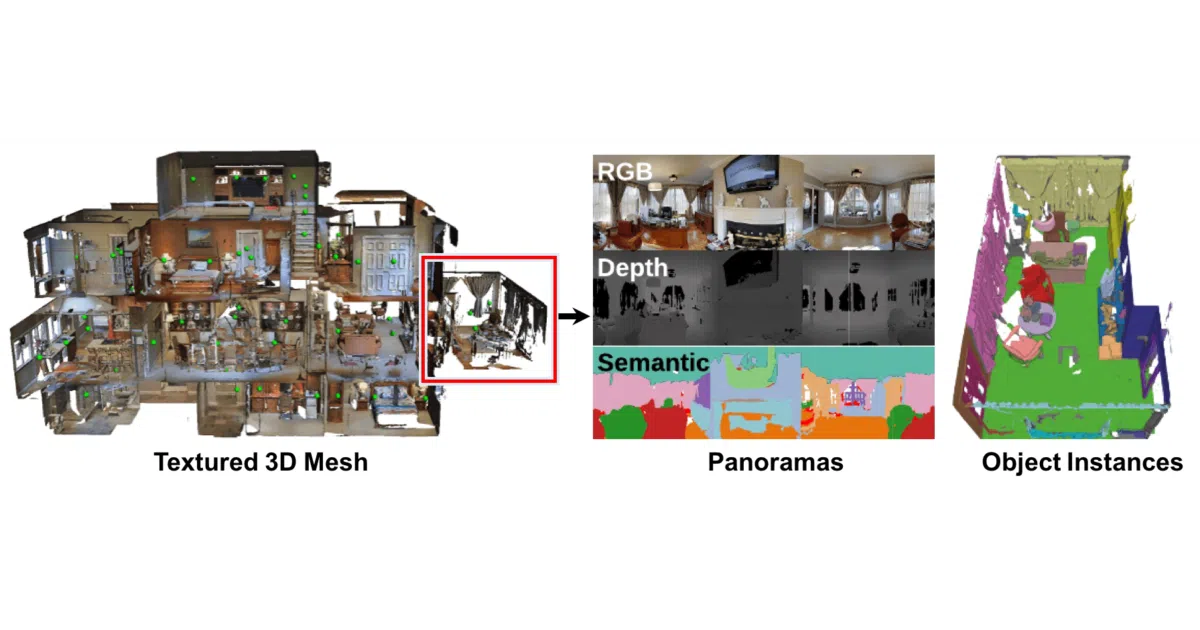
Matterport3D bundles raw and annotated data from 90 properties scanned with a Matterport Pro Camera, plus scripts and baseline models for scene-understanding tasks. The repo holds the data organization docs, benchmark definitions, and MIT-licensed loading/viewing code; the actual dataset requires signing a terms-of-use form and emailing it from an institutional address.
The interesting bit
This is from 2017, yet it is still the go-to reference for indoor RGB-D work because it pairs dense 3D meshes with semantic instance annotations and camera poses — the boring plumbing that makes multi-view learning actually reproducible.
Key highlights
- Annotations include color/depth images, camera poses, textured meshes, floor plans, region labels, and object-instance semantics
- Five benchmark tasks defined: keypoint matching, view overlap prediction, surface normal estimation, region classification, and semantic voxel labeling
- Loading and viewing utilities provided in the
codedirectory - Published at 3DV 2017; 1,217 stars suggests sustained relevance
Caveats
- Access is gated behind a signed terms-of-use form and institutional email verification
- The repo itself is mostly documentation and glue code; the value is the dataset, not novel algorithms
Verdict
Grab this if you are training or evaluating indoor scene understanding models and need a standard benchmark. Skip it if you are looking for shiny new architectures — the code here is strictly utilitarian.
Frequently asked
- What is niessner/Matterport?
- Matterport3D is the RGB-D dataset researchers keep citing when they need real indoor environments with depth, semantics, and 3D structure.
- Is Matterport open source?
- Yes — niessner/Matterport is open source, released under the MIT license.
- What language is Matterport written in?
- niessner/Matterport is primarily written in C++.
- How popular is Matterport?
- niessner/Matterport has 1.2k stars on GitHub.
- Where can I find Matterport?
- niessner/Matterport is on GitHub at https://github.com/niessner/Matterport.