nicklashansen/tdmpc2
A single world model for 104 control tasks
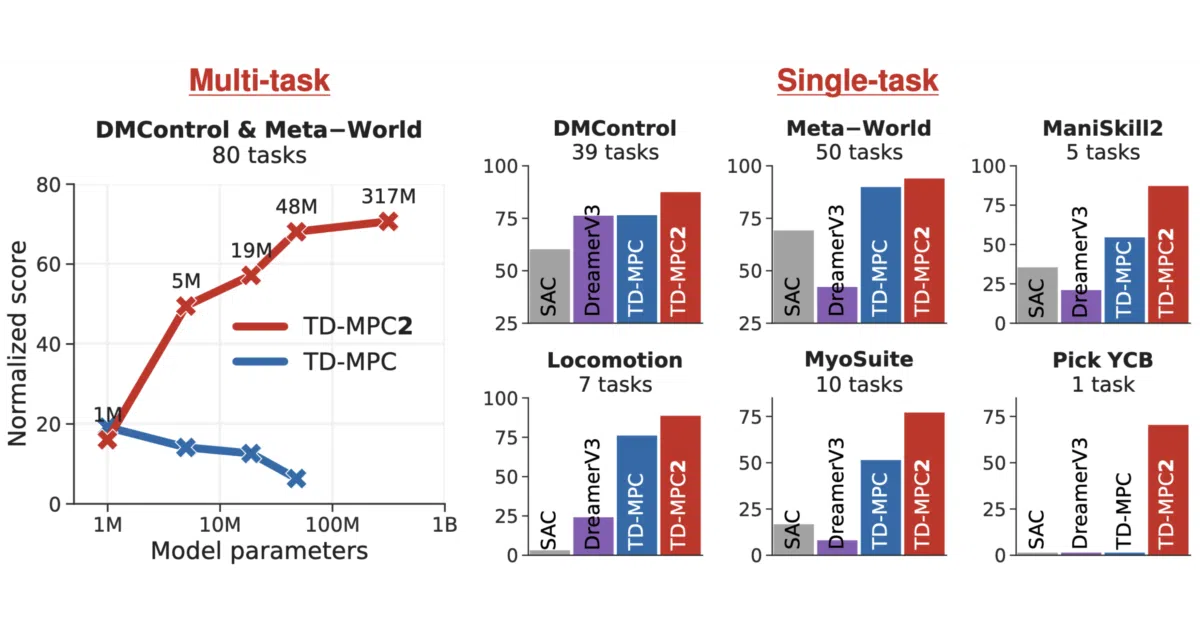
TD-MPC2 is a model-based RL algorithm built to test whether one world model can generalize across 104 continuous control tasks and multiple robot embodiments.
Not currently ranked — collecting fresh signals.
star history
What it does TD-MPC2 learns world models for continuous control in simulation. The codebase trains and evaluates agents on single-task online RL or multi-task offline RL across DMControl, Meta-World, ManiSkill2, and MyoSuite using either state vectors or raw pixels. It ships with 300+ pretrained checkpoints, including a 317M-parameter generalist trained on 80 tasks.
The interesting bit The project bets on scale over hand-tuning: a single set of hyperparameters covers all 104 tasks, and one model can juggle 80 tasks spanning different robots, action spaces, and physics domains. The authors recently added episodic task support but leave it disabled by default so earlier results remain reproducible—a refreshingly paranoid touch.
Key highlights
- One hyperparameter set trains across 104 tasks in four domains.
- A single 317M-parameter agent handles 80 tasks with different embodiments and action spaces.
- 300+ open-sourced checkpoints and multi-task datasets (30-task and 80-task) are provided.
- Supports both state and RGB observations.
- Recent April 2025 release adds episodic RL support.
Caveats
- Single-task evaluation using multi-task checkpoints is not yet supported.
- Meta-World integration depends on legacy MuJoCo 2.1.0 and
gym==0.21.0, which the authors warn is becoming painful to install. - Multi-task offline RL demands serious hardware: 128 GB of RAM and up to 24 GB of GPU memory for the largest model.
Verdict Worth a look if you research generalist model-based RL or need a strong baseline across simulated continuous control benchmarks. Skip it if you need battle-tested real-world robotics deployment or a lightweight training pipeline.
Frequently asked
- What is nicklashansen/tdmpc2?
- TD-MPC2 is a model-based RL algorithm built to test whether one world model can generalize across 104 continuous control tasks and multiple robot embodiments.
- Is tdmpc2 open source?
- Yes — nicklashansen/tdmpc2 is open source, released under the MIT license.
- What language is tdmpc2 written in?
- nicklashansen/tdmpc2 is primarily written in Python.
- How popular is tdmpc2?
- nicklashansen/tdmpc2 has 898 stars on GitHub.
- Where can I find tdmpc2?
- nicklashansen/tdmpc2 is on GitHub at https://github.com/nicklashansen/tdmpc2.