andyzeng/visual-pushing-grasping
Teaching robots to push things around so they can grab them later
A PyTorch implementation of deep RL that learns when to shove and when to grasp, directly from RGB-D camera feeds.
Not currently ranked — collecting fresh signals.
star history
What it does
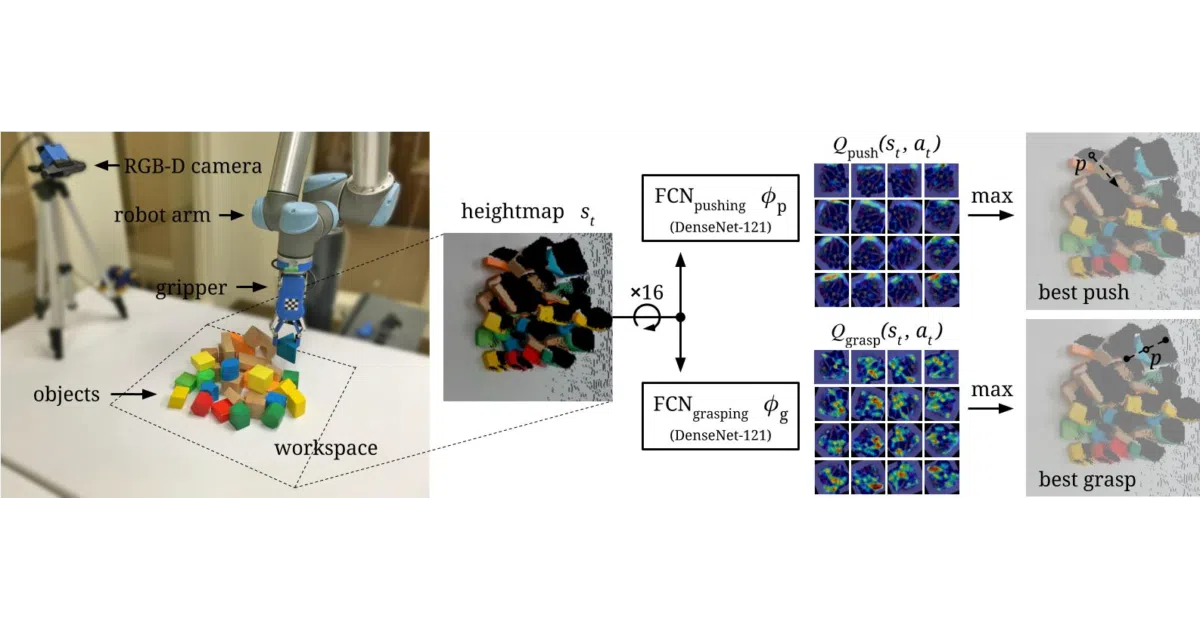
This is the reference implementation for a 2018 IROS paper on visual pushing and grasping. It trains two fully convolutional networks—one for pushes, one for grasps—jointly via Q-learning from RGB-D images. The system runs in V-REP/CoppeliaSim simulation or on a real UR5 arm, learning through trial and error with rewards coming only from successful grasps.
The interesting bit
The networks discover synergies from scratch: pushing to clear clutter for future grasps, grasping to set up better pushes. No hand-coded rules, no motion planning—just pixel-wise action sampling that generalizes to novel objects after a few hours of training.
Key highlights
- Self-supervised: rewards come only from grasp success; pushing utility is learned indirectly
- Two FCNs output dense pixel-wise maps for push and grasp candidates with orientations
- Supports both simulation (V-REP/CoppeliaSim) and real-world UR5 deployment
- Training from scratch works with PyTorch 1.0+; pre-trained models require legacy PyTorch 0.3
- Includes ablation baselines: reactive policies, grasp-only, myopic discounting, no push rewards
- GPU strongly recommended—CPU iterations take minutes versus seconds
Caveats
- Pre-trained models are stuck on PyTorch 0.3; training fresh is the modern path
- V-REP setup involves clicking through “Dynamics content” popups three times
- README notes Ubuntu 16.04 testing; newer OS compatibility is unspecified
Verdict
Worth a look if you’re doing clutter manipulation research or need a reproducible RL baseline for pick-and-place. Skip it if you want drop-in industrial deployment—the simulation glue and legacy model baggage are real.
Frequently asked
- What is andyzeng/visual-pushing-grasping?
- A PyTorch implementation of deep RL that learns when to shove and when to grasp, directly from RGB-D camera feeds.
- Is visual-pushing-grasping open source?
- Yes — andyzeng/visual-pushing-grasping is open source, released under the BSD-2-Clause license.
- What language is visual-pushing-grasping written in?
- andyzeng/visual-pushing-grasping is primarily written in Python.
- How popular is visual-pushing-grasping?
- andyzeng/visual-pushing-grasping has 1.1k stars on GitHub.
- Where can I find visual-pushing-grasping?
- andyzeng/visual-pushing-grasping is on GitHub at https://github.com/andyzeng/visual-pushing-grasping.