X-Square-Robot/wall-x
When your robot needs to think before it grasps
An open-source embodied foundation model that turns vision-language reasoning into physical robot actions, complete with chain-of-thought explanations.
Not currently ranked — collecting fresh signals.
star history
What it does
Wall-X is the training and inference codebase for the WALL series of open-source “embodied foundation models” — essentially large vision-language models (VLMs) fine-tuned to output robot actions instead of just text. The repo wraps data preparation through LeRobot, model configuration, and evaluation utilities for both real and simulated robots. It supports two action-generation branches: flow-matching and FAST.
The interesting bit
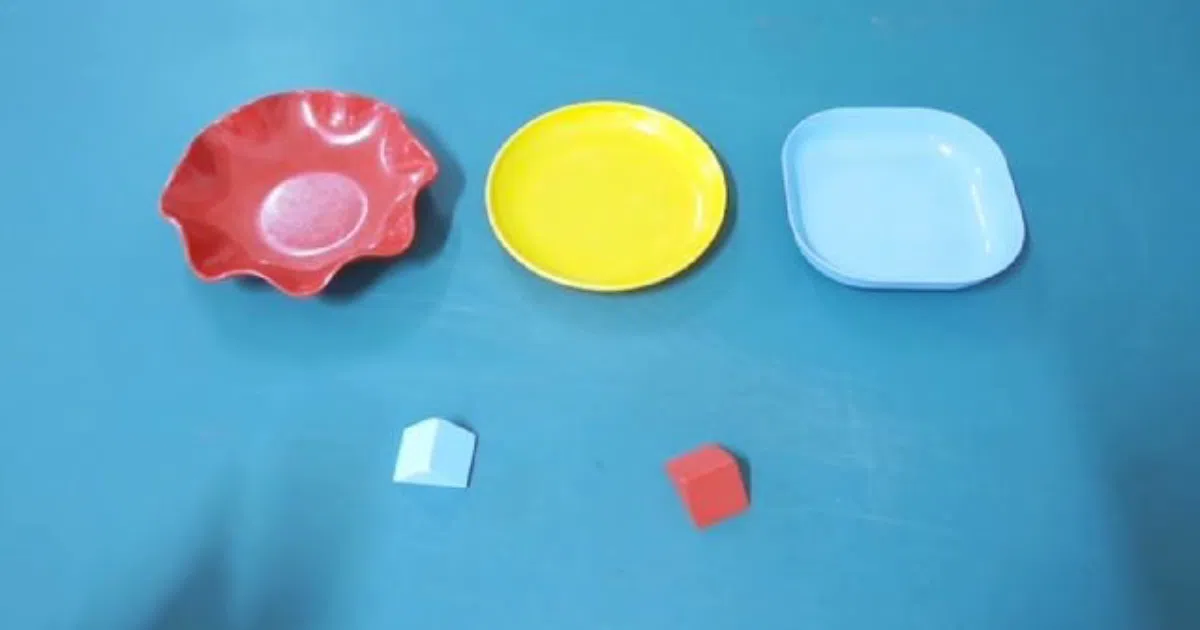
The model doesn’t just blindly output motor commands; it can reason step-by-step about physical tasks. The README shows an example where asked how to move a red block to a matching plate, the model narrates its plan — locate, grasp, lift, place — before (presumably) generating the actual trajectory. That’s unusual in robot learning, where end-to-end black boxes are the norm.
Key highlights
- Four published model variants on Hugging Face, including a 4B “deployment-ready” VLA (WALL-OSS-0.5) and a world-action model (WALL-WM) that predicts future video alongside actions
- Built on Qwen2.5-VL with MoE architecture, using FlashAttention and bfloat16 inference
- Integrates with the LeRobot ecosystem for dataset handling and training pipelines
- Supports both open-loop evaluation and closed-loop VQA inference with chain-of-thought testing
- Targets zero-shot real-robot manipulation out of the box, with fine-tuning scripts for custom robots
Caveats
- Two of the three headline models (WALL-WM and WALL-OSS-0.5) are marked “code coming soon” — only the original WALL-OSS appears fully available
- The README’s training instructions punt to
workspace/README.mdfor critical details (GPU setup, DOF configuration, hyperparameters), so the quickstart is incomplete - Requires a fairly specific stack: Python 3.10, CUDA 12.x, Ubuntu 22.04, and a pinned LeRobot commit
Verdict
Worth exploring if you’re doing VLA research or need a reasoning-capable robot brain with actual model weights to download. Skip it if you want a polished, batteries-included framework — this is research code with aspirational documentation.
Frequently asked
- What is X-Square-Robot/wall-x?
- An open-source embodied foundation model that turns vision-language reasoning into physical robot actions, complete with chain-of-thought explanations.
- Is wall-x open source?
- Yes — X-Square-Robot/wall-x is open source, released under the Apache-2.0 license.
- What language is wall-x written in?
- X-Square-Robot/wall-x is primarily written in Python.
- How popular is wall-x?
- X-Square-Robot/wall-x has 1.2k stars on GitHub.
- Where can I find wall-x?
- X-Square-Robot/wall-x is on GitHub at https://github.com/X-Square-Robot/wall-x.