PINTO0309/OpenVINO-YoloV3
YoloV3 on a Raspberry Pi, courtesy of a USB stick
A 2019 recipe for running heavy object detection on edge hardware by offloading inference to Intel's Neural Compute Stick.
Not currently ranked — collecting fresh signals.
star history
What it does
This repo is a port of YoloV3 and tiny-YoloV3 to Intel’s OpenVINO toolkit, with explicit support for Raspberry Pi 3, Ubuntu laptops, and the Neural Compute Stick (NCS/NCS2). It includes both Python and C++ inference pipelines, plus scripts that can distribute work across multiple NCS2 sticks for a modest speed boost.
The interesting bit
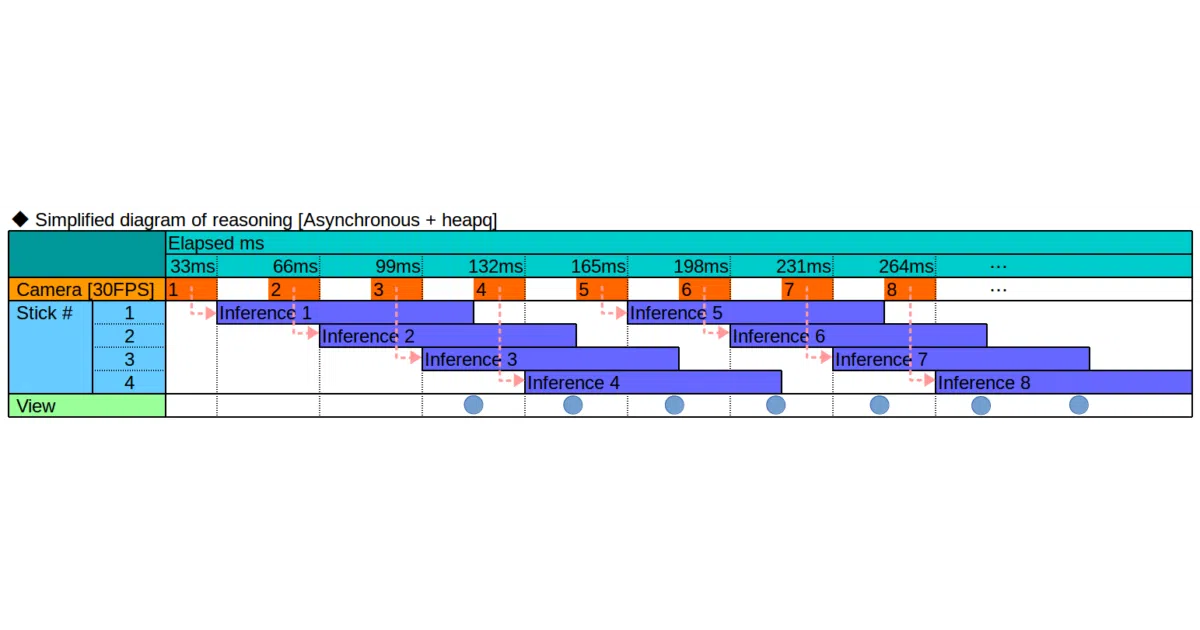
The author treats the NCS2 almost like a GPU you plug in over USB: one stick gets you ~30 FPS with tiny-YoloV3 on a Core i7, and four sticks push full YoloV3 to 13 FPS. The README is refreshingly honest about the trade-offs, ranking its own models against MobileNet-SSD on speed, accuracy, and detection distance.
Key highlights
- Python and C++ async inference demos with USB camera or MP4 input
- Multi-stick support via
-numncsflag (up to 4 NCS2 devices) - Pre- and post-processing bug fixes in March 2019 that improved accuracy
- Custom training pipeline added for proprietary datasets
- Targets OpenVINO 2019 R1.0.1, TensorFlow 1.12, OpenCV 4.1.0-openvino
Caveats
- Last meaningful update was April 2019; OpenVINO and TensorFlow have moved on significantly
- Full YoloV3 on Raspberry Pi 3 is noted as “pretty slow” due to ARM vs. Core i7 performance gap
- The C++ version lives in a separate
cpp/directory with its own build requirements
Verdict
Worth a look if you’re maintaining legacy NCS2 hardware or need a concrete reference for OpenVINO model conversion. Skip it if you’re starting fresh—modern YOLO variants and newer Intel toolkits have simpler, faster paths to deployment.
Frequently asked
- What is PINTO0309/OpenVINO-YoloV3?
- A 2019 recipe for running heavy object detection on edge hardware by offloading inference to Intel's Neural Compute Stick.
- Is OpenVINO-YoloV3 open source?
- Yes — PINTO0309/OpenVINO-YoloV3 is open source, released under the Apache-2.0 license.
- What language is OpenVINO-YoloV3 written in?
- PINTO0309/OpenVINO-YoloV3 is primarily written in Python.
- How popular is OpenVINO-YoloV3?
- PINTO0309/OpenVINO-YoloV3 has 539 stars on GitHub.
- Where can I find OpenVINO-YoloV3?
- PINTO0309/OpenVINO-YoloV3 is on GitHub at https://github.com/PINTO0309/OpenVINO-YoloV3.