NVIDIA/Isaac-GR00T
One vision-language model to puppet many robot bodies
GR00T N1.7 is an open, commercially usable vision-language-action model that lets humanoid robots generalize across hardware by learning from both robot demos and 20,000 hours of human video.
Velocity · 7d
+8.1
★ / day
Trend
→steady
star history
What it does
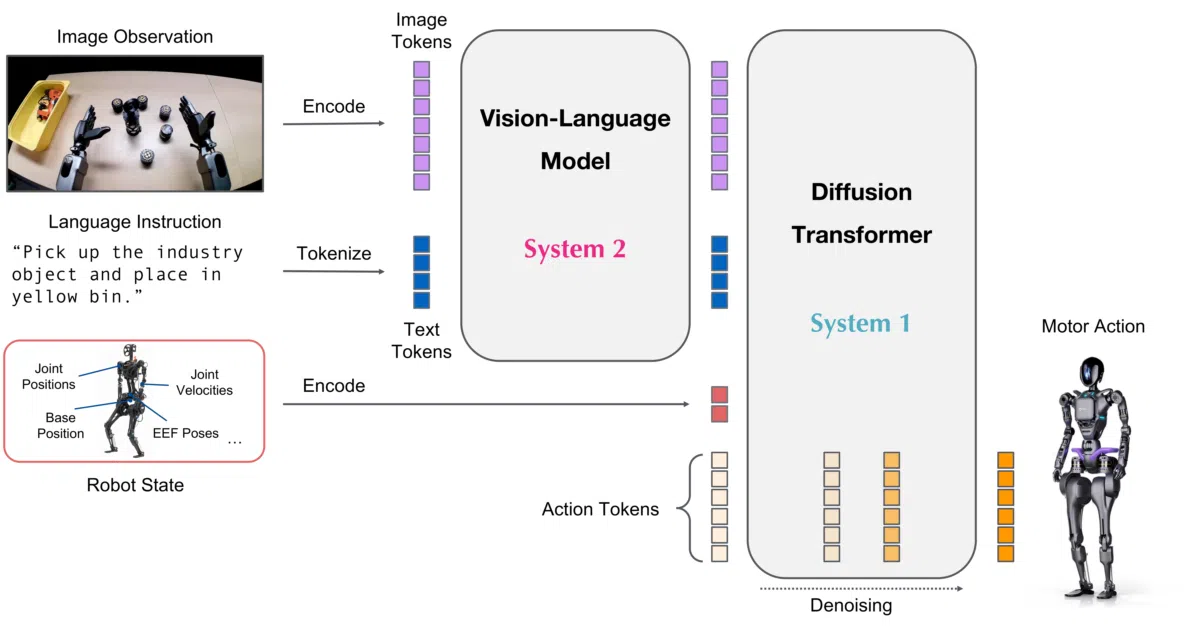
GR00T N1.7 is a 3-billion-parameter vision-language-action model that ingests language commands and camera images, then emits continuous robot motions through a diffusion transformer head. It is built to control diverse embodiments—humanoids, bimanual arms, semi-humanoid platforms—without being welded to a single hardware stack. NVIDIA ships the weights, training code, and inference pipeline under Apache 2.0, though the release is still Early Access.
The interesting bit
The model is pretrained on 20,000 hours of egocentric human video alongside traditional robot demonstrations, using a relative end-effector action space. By representing actions as pose deltas rather than absolute coordinates, the same mathematical language describes human arm movements and robot joint motions, letting the model port manipulation priors learned from people onto hardware it has never touched.
Key highlights
- Cross-embodiment architecture: one base model adapts to new robots via post-training fine-tuning.
- New VLM backbone in N1.7 uses Cosmos-Reason2-2B (Qwen3-VL), encoding images at native aspect ratio without padding.
- Diffusion transformer denoises continuous actions; the full pipeline exports to ONNX and TensorRT.
- Runs inference on a single GPU with 16 GB VRAM; fine-tuning wants 40 GB+ and prefers H100 or L40 nodes.
- Fully open-source under Apache 2.0 with commercial licensing permitted.
Caveats
- Early Access means no stability guarantees, incomplete benchmarks, and no commercial support until the GA release.
- Several platform-specific rough edges are documented, including Triton/CUDA 13 conflicts on Jetson Thor and DGX Spark, and
torch.compilefailing on GB300 GPUs.
Verdict
Grab it if you are a robotics researcher or engineer building generalist humanoid manipulation stacks; skip it if you need a battle-tested, benchmark-validated production policy today.
Frequently asked
- What is NVIDIA/Isaac-GR00T?
- GR00T N1.7 is an open, commercially usable vision-language-action model that lets humanoid robots generalize across hardware by learning from both robot demos and 20,000 hours of human video.
- Is Isaac-GR00T open source?
- Yes — NVIDIA/Isaac-GR00T is open source, released under the Apache-2.0 license.
- What language is Isaac-GR00T written in?
- NVIDIA/Isaac-GR00T is primarily written in Python.
- How popular is Isaac-GR00T?
- NVIDIA/Isaac-GR00T has 7.7k stars on GitHub and is currently holding steady.
- Where can I find Isaac-GR00T?
- NVIDIA/Isaac-GR00T is on GitHub at https://github.com/NVIDIA/Isaac-GR00T.