InternRobotics/PointLLM
Teaching LLMs to see in 3D without rendering a pixel
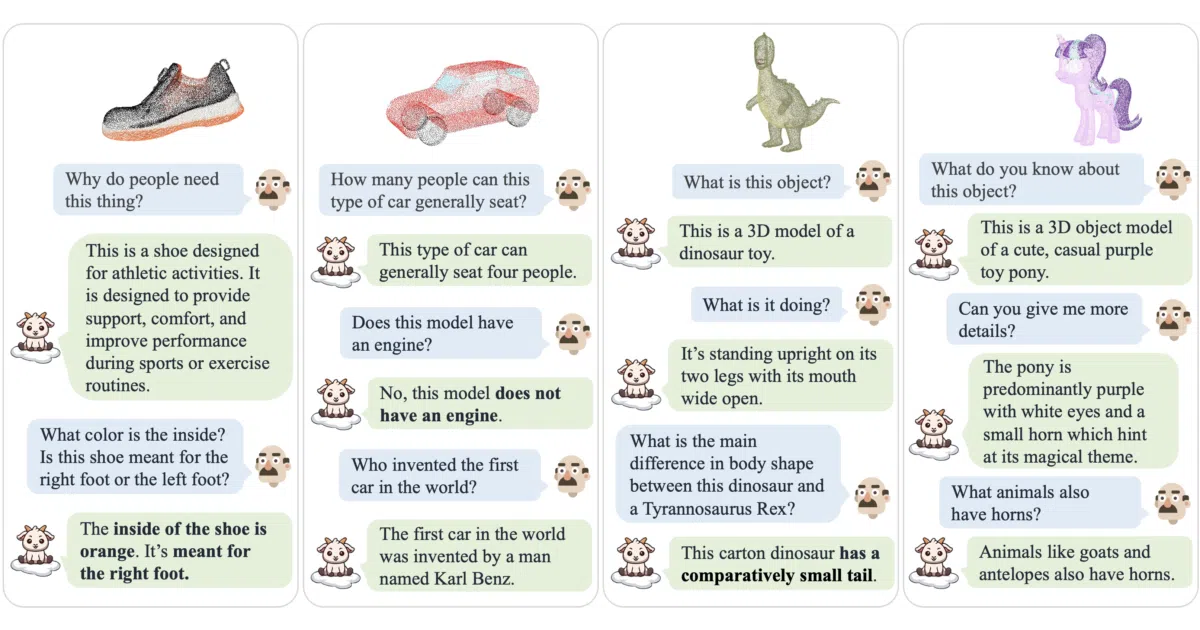
PointLLM feeds colored 3D point clouds directly into a large language model so it can discuss object geometry and appearance without 2D image intermediaries.
Not currently ranked — collecting fresh signals.
star history
What it does
PointLLM is a multimodal LLM that ingests colored point clouds—xyz coordinates plus RGB values—and converses about the objects they represent. A point encoder projects 8192-point cloud features into the token space of a Vicuna backbone, which then processes interleaved point and text tokens to generate responses. The project ships training code, evaluation scripts, and pretrained 7B/13B checkpoints for tasks like 3D object classification and captioning.
The interesting bit
Instead of rendering point clouds to 2D images and bolting on a vision encoder, the team treats raw point clouds as a direct modality for the LLM. They also built a 730K-sample instruction dataset from Objaverse—660K simple descriptions plus 70K complex instructions generated by GPT-4—and had to invent new benchmarks because standard NLP metrics poorly judge 3D semantic accuracy.
Key highlights
- Consumes raw colored point clouds (
(8192, 6)numpy arrays) via a dedicated point encoder mapped to LLM latent space - Trained on 730K point-text instruction pairs from Objaverse using a two-stage strategy
- Evaluated with custom benchmarks for generative 3D classification and captioning, including GPT-4-based judgment
- Available in 7B and 13B variants based on Vicuna-v1.1
- ECCV 2024 best-paper candidate; improved PointLLM-V2 accepted at TPAMI 2025
Caveats
- The online demo was closed in April 2025; there is no hosted interface
- The authors caution that traditional NLP metrics (BLEU-1, ROUGE-L, METEOR) poorly capture semantic accuracy for 3D tasks
- Reproducing results requires downloading ~77GB of Objaverse point cloud data and multiple annotation files
Verdict Grab this if you’re researching 3D vision-language models or need a baseline for point-cloud understanding beyond rendered views. Skip it if you want a hosted API or a plug-and-play chatbot—the demo is offline and the data footprint is substantial.
Frequently asked
- What is InternRobotics/PointLLM?
- PointLLM feeds colored 3D point clouds directly into a large language model so it can discuss object geometry and appearance without 2D image intermediaries.
- Is PointLLM open source?
- Yes — InternRobotics/PointLLM is an open-source project tracked on heatdrop.
- What language is PointLLM written in?
- InternRobotics/PointLLM is primarily written in Python.
- How popular is PointLLM?
- InternRobotics/PointLLM has 1k stars on GitHub.
- Where can I find PointLLM?
- InternRobotics/PointLLM is on GitHub at https://github.com/InternRobotics/PointLLM.