uber-research/LaneGCN
Motion forecasting by treating road lanes as graphs
LaneGCN predicts where traffic agents will move next by learning graph representations of lane structures, an approach that won first place in the Argoverse 2020 motion-forecasting competition.
Not currently ranked — collecting fresh signals.
star history
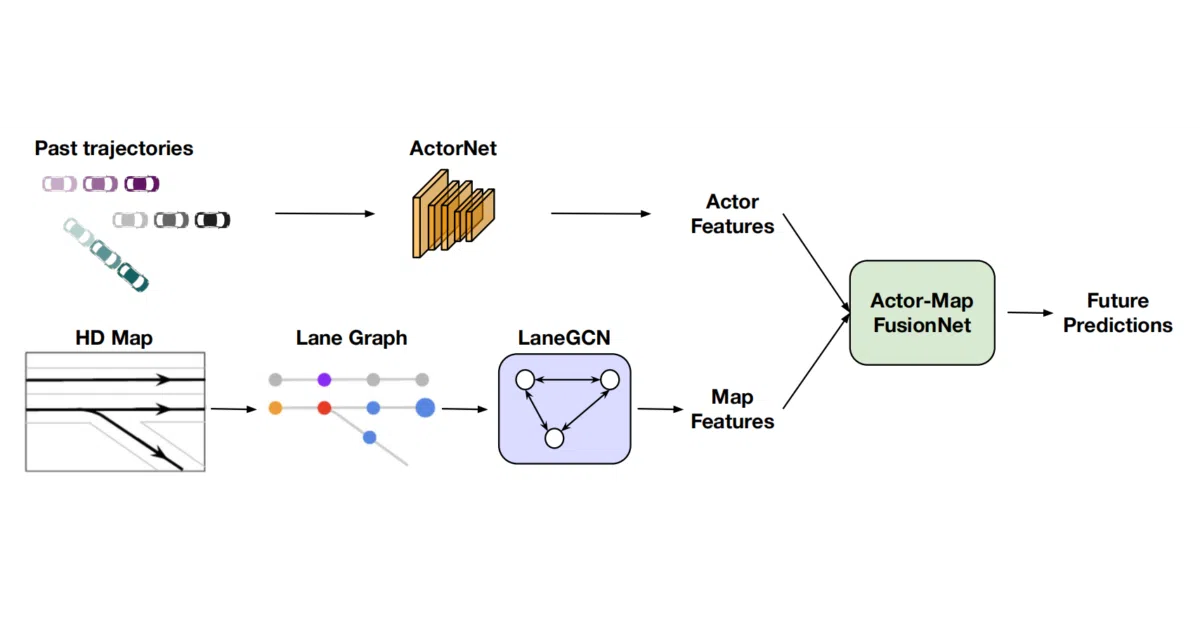
What it does LaneGCN is a motion-forecasting system for autonomous driving that learns graph representations of lane structures to predict where agents will move next. The repository implements the ECCV 2020 Oral paper that ranked first in the Argoverse Motion Forecasting Competition, providing training and inference code built on PyTorch.
The interesting bit The model encodes lane structures as graphs and uses graph neural networks to learn representations for motion forecasting. That graph-centric approach is the core idea of the work, and it was enough to win first place in the Argoverse competition.
Key highlights
- ECCV 2020 Oral and first place in the Argoverse Motion Forecasting Competition.
- Implements graph-neural-network-based lane encoding for motion forecasting.
- Includes pretrained weights and a training log for debugging or reproduction.
- Distributed training via Horovod is supported; the authors report roughly eight hours on four RTX 5000 GPUs.
Caveats
- The Amazon S3 bucket hosting demo files has been compromised, so related data retrievals are commented out and files may be corrupted.
- The code is tightly coupled to the Argoverse API and dataset.
- The documented training recipe targets multi-GPU setups; single-GPU mode exists but the supplied logs and timings assume four GPUs.
Verdict A solid reference for researchers building graph-based motion forecasters or reproducing Argoverse competition results. Casual explorers should beware the compromised data bucket and the heavy GPU requirements.
Frequently asked
- What is uber-research/LaneGCN?
- LaneGCN predicts where traffic agents will move next by learning graph representations of lane structures, an approach that won first place in the Argoverse 2020 motion-forecasting competition.
- Is LaneGCN open source?
- Yes — uber-research/LaneGCN is an open-source project tracked on heatdrop.
- What language is LaneGCN written in?
- uber-research/LaneGCN is primarily written in Python.
- How popular is LaneGCN?
- uber-research/LaneGCN has 554 stars on GitHub.
- Where can I find LaneGCN?
- uber-research/LaneGCN is on GitHub at https://github.com/uber-research/LaneGCN.