silvery107/rl-mpc-locomotion
Letting a neural network pick MPC weights so your dog bot doesn't trip
Because hand-tuning MPC cost matrices for a trotting quadruped is tedious, this repo trains a policy in Isaac Gym to do it automatically.
Not currently ranked — collecting fresh signals.
star history
What it does
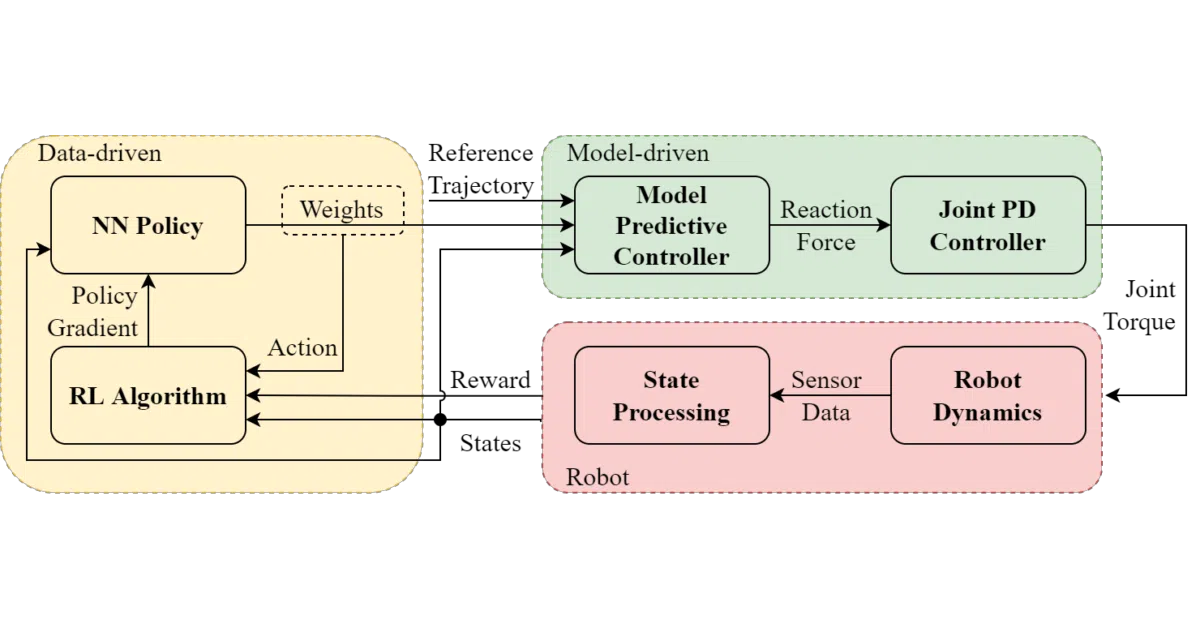
This project is a simulation and training framework for quadruped locomotion that pairs a high-level reinforcement learning policy with a low-level convex model-predictive controller. The RL policy, trained in NVIDIA Isaac Gym, dynamically predicts the weight parameters of the MPC rather than outputting motor torques directly. The MPC layer is a Python reimplementation of MIT’s Cheetah Software, complete with a finite-state machine for gait scheduling and a C-based OSQP solver backend.
The interesting bit
The hierarchy keeps the optimizer responsible for physics constraints and contact dynamics while the neural network handles the messier task of cost-function tuning. It is essentially a bet that MPC should do what it is good at—respecting constraints—while RL learns the knobs that are painful to dial by hand.
Key highlights
- Hierarchical control: the RL policy sets MPC cost weights, and the MPC computes ground reaction forces and swing trajectories.
- Python port of MIT Cheetah Software with a clean sensor-to-motor interface designed for mainstream simulators.
- Trains vectorized environments in NVIDIA Isaac Gym on Unitree’s Aliengo model; also supports A1 and Go1.
- Includes a finite-state machine with
LocomotionandRecoveryStandstates and gait switching acrossTrot,Walk, andBound. - Uses a C-based OSQP solver (
mpc_osqp.cc) for the convex MPC, bound to Python.
Caveats
- Sim-to-real transfer to a physical Aliengo is shown in the gallery, but the transfer code is explicitly excluded from this repository.
Verdict
A solid reference if you are researching hierarchical RL-MPC hybrids for legged robots. Skip it if you are looking for a drop-in sim-to-real pipeline or a pure end-to-end RL walking policy.
Frequently asked
- What is silvery107/rl-mpc-locomotion?
- Because hand-tuning MPC cost matrices for a trotting quadruped is tedious, this repo trains a policy in Isaac Gym to do it automatically.
- Is rl-mpc-locomotion open source?
- Yes — silvery107/rl-mpc-locomotion is open source, released under the MIT license.
- What language is rl-mpc-locomotion written in?
- silvery107/rl-mpc-locomotion is primarily written in Python.
- How popular is rl-mpc-locomotion?
- silvery107/rl-mpc-locomotion has 1k stars on GitHub.
- Where can I find rl-mpc-locomotion?
- silvery107/rl-mpc-locomotion is on GitHub at https://github.com/silvery107/rl-mpc-locomotion.