rerun-io/rerun
RViz with a memory and a SQL engine
Rerun is a Rust-built data layer for physical AI that turns chaotic, multi-rate robot sensor streams into a single timeline you can scrub, query with SQL, and stream straight into training.
Velocity · 7d
+4.9
★ / day
Trend
→steady
star history
What it does
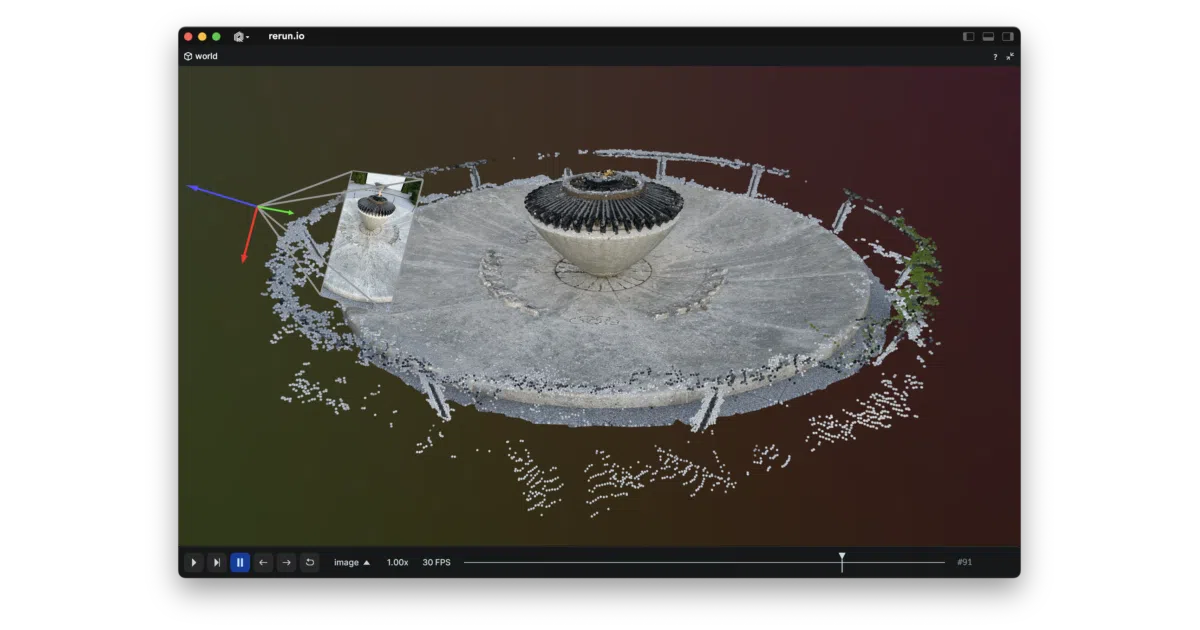
Rerun ingests multi-rate, multimodal data—images, point clouds, transforms, time series, joint states, and video—from sources like robot logs, human-data rigs, simulators, and web video into a single columnar store. A built-in viewer renders all streams time-synced so you can scrub through episodes, compare sensors side-by-side, and watch computer-vision pipelines live. The same storage is queryable via dataframes or SQL and can stream directly into model training without intermediate exports.
The interesting bit
Unlike pure visualization tools that only show the latest frame, Rerun treats the entire recording as a queryable database, turning your robot’s perception history into table edits you can filter and stream into training. It is built in Rust on column-chunk storage purpose-built for the irregular, multi-rate nature of physical sensor data rather than forcing it into generic shapes.
Key highlights
- Ingests from formats like
MCAP,.rrd, and LeRobot alongside live streams - Time-aware viewer with an in-memory buffer you can size for long-running or memory-constrained deployments
- Query APIs expose raw, intermediate, and derived data for dataset extraction
- SDKs available in Python, Rust, and C++ (Python bundles the viewer; C++ and Rust need a separate binary)
- Open-core model: the core project stays open source while Rerun Hub targets team-scale commercial use
Caveats
- The API is still evolving and breaking changes are expected
- Viewer performance degrades when managing too many entities
- Rendering multi-million point clouds can be slow
Verdict
Worth a look if you are building or debugging robotics, computer vision, or any multi-sensor pipeline where text logs are insufficient. If you only need a lightweight, latest-frame ROS visualizer, RViz is still the simpler path.
Frequently asked
- What is rerun-io/rerun?
- Rerun is a Rust-built data layer for physical AI that turns chaotic, multi-rate robot sensor streams into a single timeline you can scrub, query with SQL, and stream straight into training.
- Is rerun open source?
- Yes — rerun-io/rerun is open source, released under the Apache-2.0 license.
- What language is rerun written in?
- rerun-io/rerun is primarily written in Rust.
- How popular is rerun?
- rerun-io/rerun has 11.2k stars on GitHub and is currently holding steady.
- Where can I find rerun?
- rerun-io/rerun is on GitHub at https://github.com/rerun-io/rerun.