qgallouedec/panda-gym
OpenAI Fetch-style robot tasks, rebuilt for Gymnasium and a Panda arm
It recreates OpenAI’s classic robot manipulation tasks for a simulated Franka Emika Panda arm, using the modern Gymnasium API to keep your hardware budget at zero.
Not currently ranked — collecting fresh signals.
star history
What it does
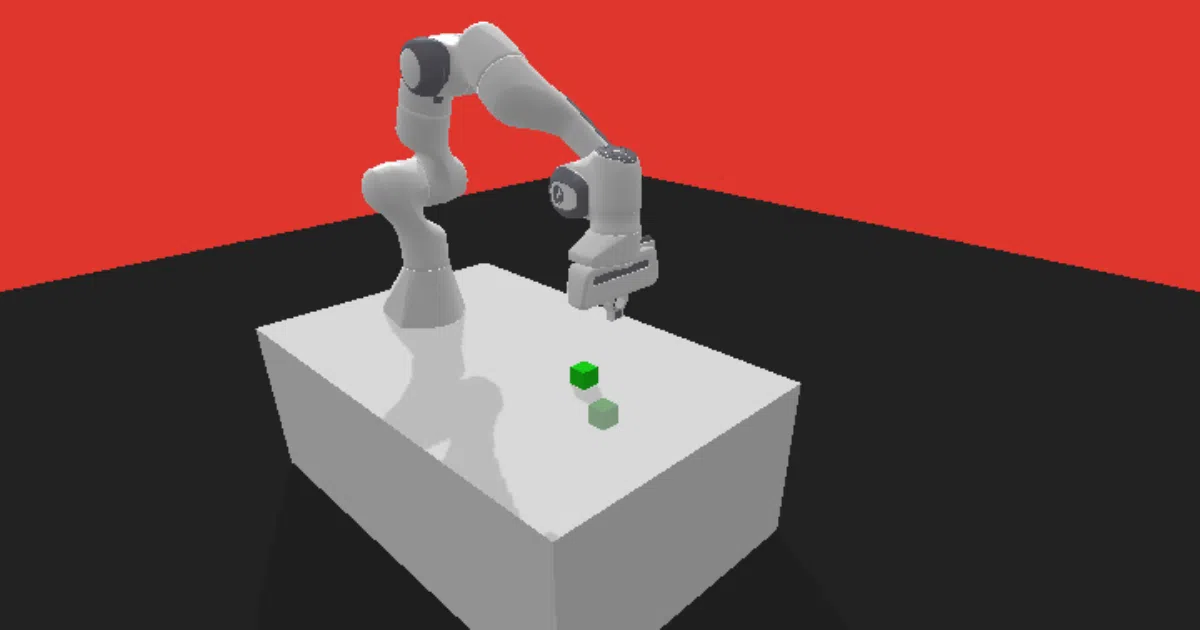
panda-gym is a collection of six manipulation environments—reach, push, slide, pick-and-place, stack, and flip—built around a simulated Franka Emika Panda robot. It wraps PyBullet physics in the Gymnasium API, letting standard RL libraries drive the arm without ever endangering physical hardware. The tasks are explicitly modeled after OpenAI’s older Fetch environments, ported to the current gymnasium standard.
The interesting bit
Rather than inventing new challenges, the project carefully translates a well-known robotics benchmark suite to a widely used open-source arm and a modern API. That makes it a convenient drop-in replacement when you are reproducing older papers or benchmarking new algorithms against a familiar baseline.
Key highlights
- Six standard manipulation tasks:
PandaReach-v3,PandaPush-v3,PandaSlide-v3,PandaPickAndPlace-v3,PandaStack-v3, andPandaFlip-v3. - Built on PyBullet physics and the
gymnasiuminterface, compatible with standard RL training loops. - Pre-trained baseline agents and training results available through
rl-baselines3-zooand the Hugging Face Hub. - Published academic paper (arXiv:2106.13687) and actively maintained with CI, code coverage, and documentation.
Caveats
- The README notes the environments are “widely inspired” by OpenAI Fetch rather than direct re-implementations, so exact behavioral parity with the originals is unclear.
Verdict
Worth a look if you need a lightweight, off-the-shelf manipulation benchmark for a standard RL pipeline. Skip it if you are looking for diverse robot morphologies or high-fidelity physics beyond PyBullet’s scope.
Frequently asked
- What is qgallouedec/panda-gym?
- It recreates OpenAI’s classic robot manipulation tasks for a simulated Franka Emika Panda arm, using the modern Gymnasium API to keep your hardware budget at zero.
- Is panda-gym open source?
- Yes — qgallouedec/panda-gym is open source, released under the MIT license.
- What language is panda-gym written in?
- qgallouedec/panda-gym is primarily written in Python.
- How popular is panda-gym?
- qgallouedec/panda-gym has 764 stars on GitHub.
- Where can I find panda-gym?
- qgallouedec/panda-gym is on GitHub at https://github.com/qgallouedec/panda-gym.