peteanderson80/Matterport3DSimulator
A gym for robots that prefer IKEA to Unreal Engine
Reinforcement learning simulator built on real panoramic scans of actual buildings, not synthetic worlds.
Not currently ranked — collecting fresh signals.
star history
What it does
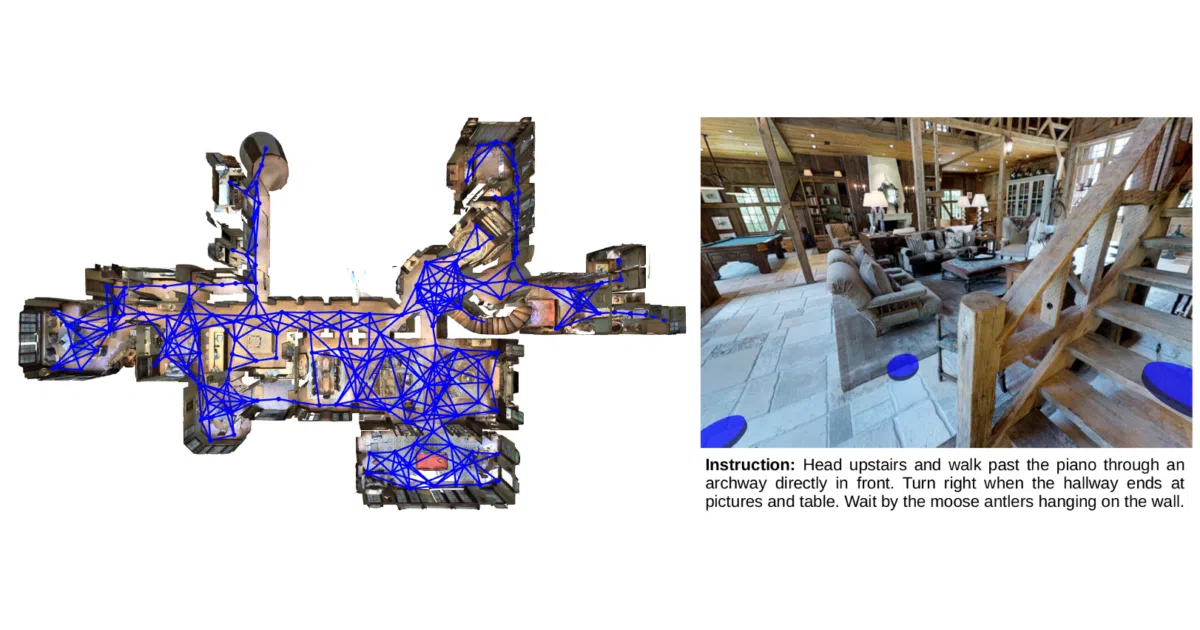
The Matterport3D Simulator drops RL agents into 90 real indoor environments—homes, offices, churches, hotels—captured as dense 360° RGB-D panoramas. Agents look around, move between viewpoints, and navigate by natural language instructions. It’s essentially a training ground for vision-and-language navigation research, with C++ and Python APIs and a Dockerized build that (the authors hope) saves you from dependency hell.
The interesting bit
The visual complexity comes from reality, not a graphics engine. The dataset uses actual Matterport scans with all the messy detail—shiny surfaces, depth holes, awkward lighting—that synthetic environments usually sanitize away. The simulator renders off-screen at ~1000 fps on a Titan X, which is fast enough that the “real images” trade-off doesn’t mean “real slow.”
Key highlights
- 90 indoor scenes, 8–349 viewpoints each, ~2.25m apart across full walkable floorplans
- Real RGB-D output (not synthetic); depth enabled via preprocessing script
- Three rendering backends: GPU (OpenGL/X11), off-screen GPU (EGL, recommended), off-screen CPU (OSMesa)
- Batched multi-agent support since the 2019 update; v0.1 tag preserved for API stability
- Ships with Room-to-Room (R2R) task data, EvalAI leaderboard, and web interface for AMT data collection
Caveats
- Dataset access requires request/approval; minimum 50 GB RAM for full timing test
- Depth-to-RGB alignment is approximate; perfect alignment needs manual re-stitching from undistorted color images
- Docker + nvidia-docker2.0 effectively mandatory unless you enjoy local dependency archaeology
Verdict
Grab this if you’re doing embodied navigation, instruction-following, or any RL research where synthetic environments feel too clean. Skip it if you need outdoor scenes, perfect depth-RGB alignment, or a quick-start without dataset paperwork.
Frequently asked
- What is peteanderson80/Matterport3DSimulator?
- Reinforcement learning simulator built on real panoramic scans of actual buildings, not synthetic worlds.
- Is Matterport3DSimulator open source?
- Yes — peteanderson80/Matterport3DSimulator is an open-source project tracked on heatdrop.
- What language is Matterport3DSimulator written in?
- peteanderson80/Matterport3DSimulator is primarily written in C++.
- How popular is Matterport3DSimulator?
- peteanderson80/Matterport3DSimulator has 705 stars on GitHub.
- Where can I find Matterport3DSimulator?
- peteanderson80/Matterport3DSimulator is on GitHub at https://github.com/peteanderson80/Matterport3DSimulator.