open-mmlab/OpenPCDet
One PyTorch toolbox for most major LiDAR detectors
It exists to stop researchers from rebuilding the same PyTorch training scaffolding every time they want to benchmark a new LiDAR detector.
Not currently ranked — collecting fresh signals.
star history
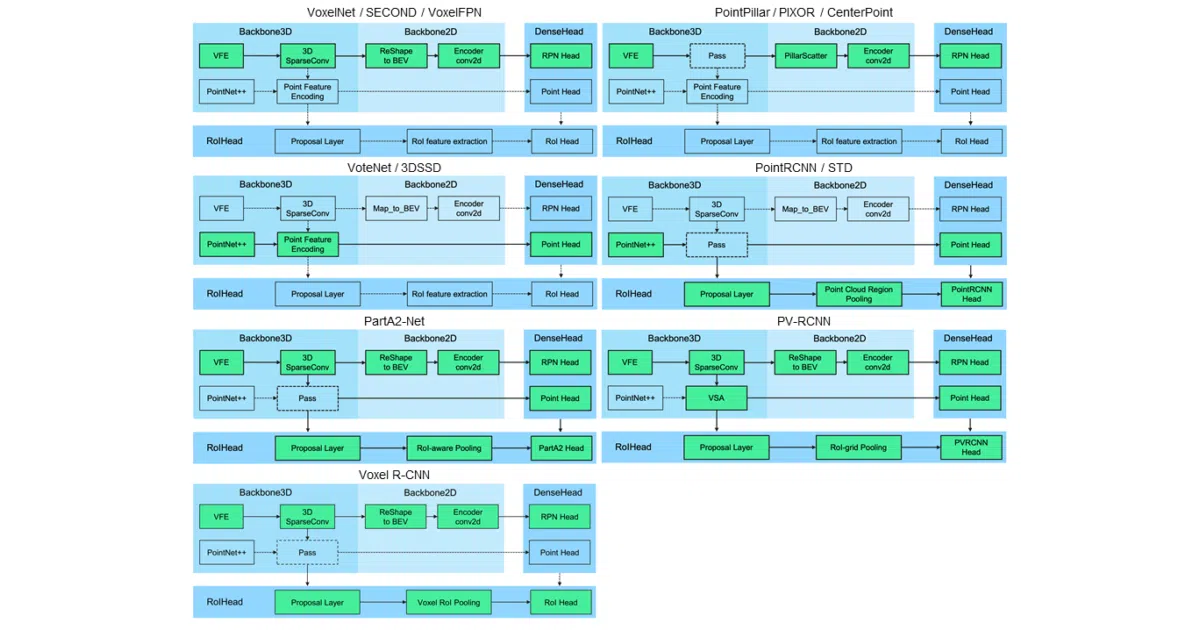
What it does OpenPCDet is a PyTorch toolbox for 3D object detection from LiDAR point clouds. It collects implementations of major architectures—PointRCNN, PV-RCNN, Voxel R-CNN, CenterPoint, BEVFusion, and others—into one refactored framework with shared data loading and training logic. The project supports datasets including KITTI, NuScenes, Waymo Open Dataset, and Argoverse2, and it serves as the official code release for several of the methods it hosts.
The interesting bit Instead of letting every paper ship its own brittle scripts, OpenPCDet enforces a strict data-model separation with unified point cloud coordinates and a single 3D box definition. That design lets you swap datasets or models without rewriting coordinate transforms, and it is the same infrastructure that won Waymo Open Dataset challenges in 3D detection, tracking, and domain adaptation among LiDAR-only methods.
Key highlights
- Official releases of PointRCNN, PV-RCNN++, MPPNet, and other architectures bundled in one repo
- Supports one-stage and two-stage frameworks, plus multi-modal fusion such as BEVFusion and TransFusion-Lidar
- Distributed training across multiple GPUs and machines
- Temporal 3D detection via MPPNet, which ranked first on the Waymo 3D detection leaderboard in September 2022
- Includes a model zoo with configs and pretrained weights for KITTI, NuScenes, and Waymo
Caveats
- Waymo dataset preparation is version-sensitive; the changelog repeatedly warns that you must re-prepare validation infos or ground-truth databases after upgrading.
- The README contains visible typos (“ahcieves”, “learderboard”, “mintues”), suggesting maintenance prioritizes code over copy-editing.
Verdict Worth a look if you are doing research or prototyping in autonomous driving perception. Skip it if you just need a quick, drop-in detector without wrangling dataset formats.
Frequently asked
- What is open-mmlab/OpenPCDet?
- It exists to stop researchers from rebuilding the same PyTorch training scaffolding every time they want to benchmark a new LiDAR detector.
- Is OpenPCDet open source?
- Yes — open-mmlab/OpenPCDet is open source, released under the Apache-2.0 license.
- What language is OpenPCDet written in?
- open-mmlab/OpenPCDet is primarily written in Python.
- How popular is OpenPCDet?
- open-mmlab/OpenPCDet has 5.7k stars on GitHub.
- Where can I find OpenPCDet?
- open-mmlab/OpenPCDet is on GitHub at https://github.com/open-mmlab/OpenPCDet.