mgonzs13/yolo_ros
YOLO's entire family tree, now speaking ROS 2 natively
A ROS 2 wrapper that turns Ultralytics' YOLO zoo into first-class robot citizens with lifecycle nodes, 3D depth fusion, and dynamic class switching.
Not currently ranked — collecting fresh signals.
star history
What it does
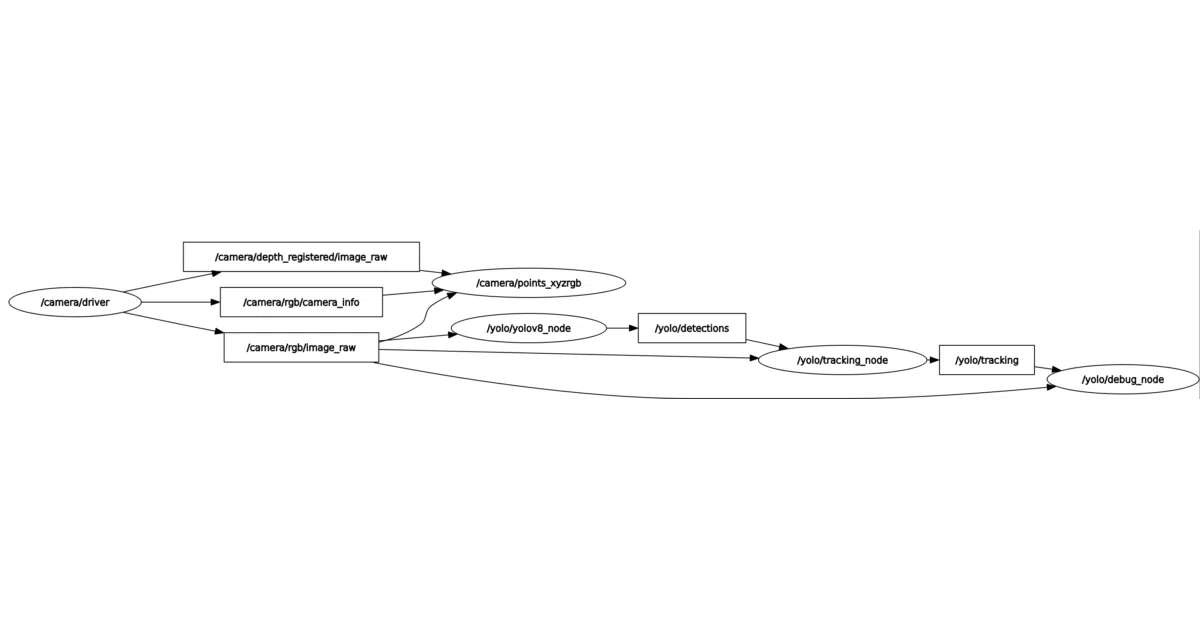
yolo_ros is a ROS 2 integration layer for Ultralytics YOLO models. It subscribes to camera topics, runs detection/tracking/segmentation/pose estimation/OBB, and publishes results as standard ROS messages. It also fuses RGB detections with depth images to produce 3D bounding boxes and keypoints. The package supports YOLOv3 through YOLOv12, plus YOLO-World and YOLOE.
The interesting bit
Lifecycle Nodes are the quiet win here: the package only loads models and activates subscribers when in the active state, cutting CPU from ~50% to ~7% and bandwidth from 200 Mbps to near-zero when idle. That’s genuinely useful for battery-powered robots that can’t afford a GPU constantly warming its bench. YOLO-World also gets a /yolo/set_classes service for on-the-fly class list changes without restart.
Key highlights
- Supports 13 YOLO variants including YOLO-World and YOLOE
- 3D detection via depth image cropping, not just reprojection tricks
- Lifecycle Nodes with measured resource savings (i7-12th-gen, yolov8m.pt baseline)
- Docker images for six ROS 2 distros: Humble through Rolling
- Debug topic (
/yolo/debug_image) and rviz2-ready visualization
Caveats
- README notes NVIDIA Container Toolkit is required for GPU Docker support; no AMD or CPU-optimized paths mentioned
- 3D features depend on aligned depth cameras; calibration quality is your problem
Verdict
ROS 2 roboticists who need drop-in vision with modern YOLO variants should grab this. Pure computer-vision researchers working outside ROS can skip it—this is glue code, but it’s well-engineered glue.
Frequently asked
- What is mgonzs13/yolo_ros?
- A ROS 2 wrapper that turns Ultralytics' YOLO zoo into first-class robot citizens with lifecycle nodes, 3D depth fusion, and dynamic class switching.
- Is yolo_ros open source?
- Yes — mgonzs13/yolo_ros is open source, released under the GPL-3.0 license.
- What language is yolo_ros written in?
- mgonzs13/yolo_ros is primarily written in Python.
- How popular is yolo_ros?
- mgonzs13/yolo_ros has 1.1k stars on GitHub.
- Where can I find yolo_ros?
- mgonzs13/yolo_ros is on GitHub at https://github.com/mgonzs13/yolo_ros.