lmb-freiburg/demon
Teaching neural nets to see like 1981, but with more CUDA
A ConvNet that learns to estimate depth and camera motion from just two images, replacing classical geometry with learned intuition.
Not currently ranked — collecting fresh signals.
star history
What it does
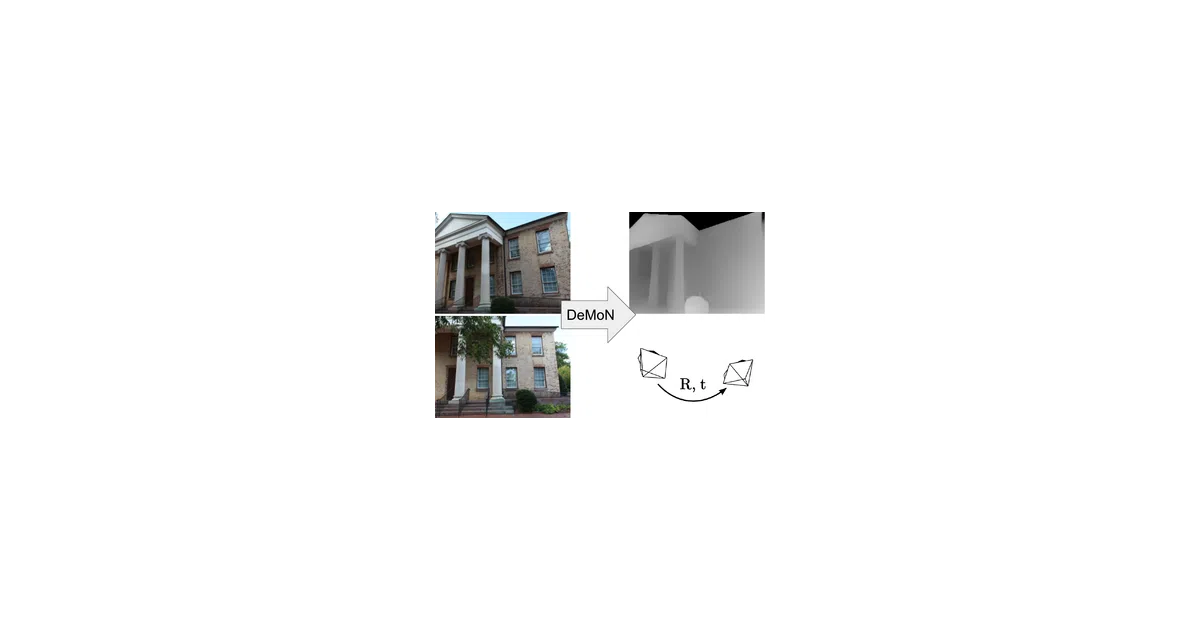
DeMoN takes two photographs of the same scene and predicts two things: how far away everything is (depth), and how the camera moved between shots. It’s the classic “structure from motion” two-view problem, but solved with a convolutional network rather than the hand-tuned geometric pipelines of old.
The interesting bit
The authors cheekily borrow their subtitle from a 1981 paper by H. C. Longuet-Higgins — the foundational work on two-view reconstruction — then note that their network learns those “complex geometric relations” implicitly from data. The old guard did it with epipolar geometry and matrix decompositions; DeMoN does it with backprop and enough training data.
Key highlights
- Estimates both depth maps and relative camera pose (rotation + translation) jointly
- Published at CVPR 2017 by the Freiburg computer vision lab
- Ships with Docker support and a pretrained weights download script
- Includes evaluation code and (work-in-progress) TensorFlow training code ported from the original Caffe implementation
- Depends on a custom ops library (
lmbspecialops) included as a submodule
Caveats
- Dependency stack is frozen in 2017 amber: TensorFlow 1.4, CUDA 8, Python 3.5, VTK 7.1
- VTK’s python3 interface requires building from source or hunting through Anaconda; the binary release won’t cut it
- The TensorFlow training code is explicitly noted as “work in progress” and not identical to the original Caffe model
- Dataset download scripts had a bug where
rgbd-prefixed files leaked test samples; fixed versions usergbd_bugfixprefix
Verdict
Worth a look if you’re researching learned multi-view geometry or need a baseline for depth-from-stereo-with-motion. Skip it if you need production-ready code on modern TensorFlow — this is a research artifact with the dependency scars to prove it.
Frequently asked
- What is lmb-freiburg/demon?
- A ConvNet that learns to estimate depth and camera motion from just two images, replacing classical geometry with learned intuition.
- Is demon open source?
- Yes — lmb-freiburg/demon is open source, released under the GPL-3.0 license.
- What language is demon written in?
- lmb-freiburg/demon is primarily written in Python.
- How popular is demon?
- lmb-freiburg/demon has 587 stars on GitHub.
- Where can I find demon?
- lmb-freiburg/demon is on GitHub at https://github.com/lmb-freiburg/demon.