hustvl/DiffusionDrive
Diffusion models learn to drive without the slow burn
It speeds up diffusion policies by 10× so they can finally run real-time end-to-end autonomous driving in dynamic traffic.
Not currently ranked — collecting fresh signals.
star history
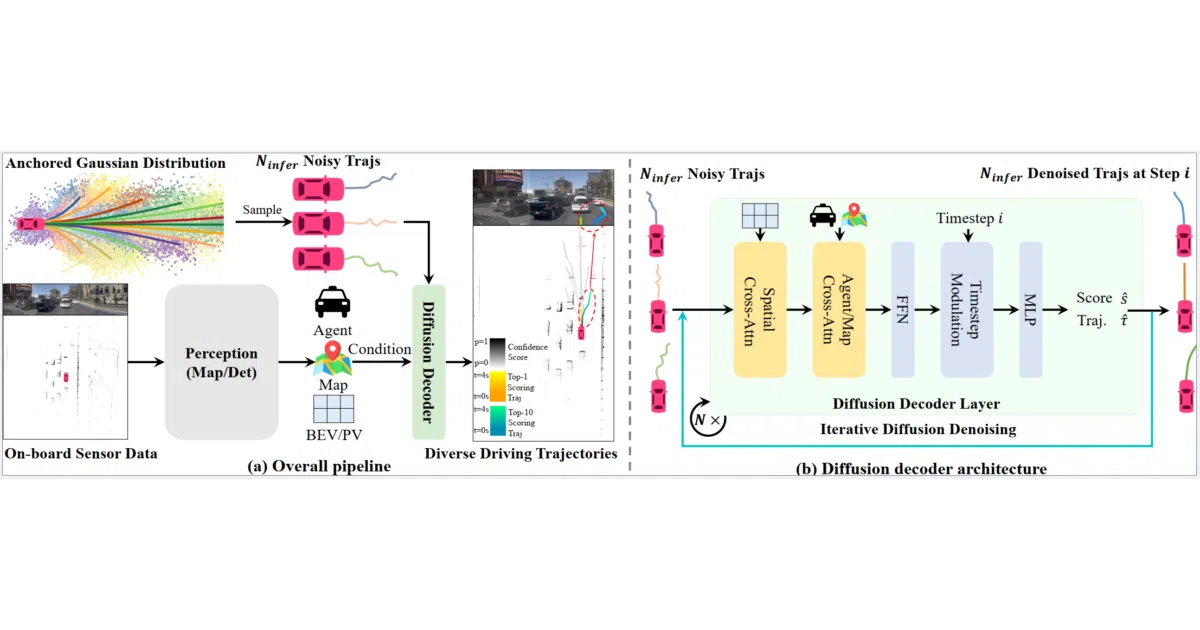
What it does DiffusionDrive is an end-to-end autonomous driving system that learns trajectory policies directly from human demonstrations. It uses a truncated diffusion model to generate diverse, multimodal driving behaviors while integrating with existing onboard sensors and perception modules.
The interesting bit Standard diffusion policies need too many denoising steps for real-time driving; DiffusionDrive cuts those steps by 10× and still claims a record 88.1 PDMS on NAVSIM with a plain ResNet-34 backbone. The trick is learning to drive without running the full generative slow burn.
Key highlights
- 10× reduction in diffusion denoising steps versus vanilla diffusion policy
- 88.1 PDMS on NAVSIM with ResNet-34 (60M parameters); competitive L2 and collision rates on nuScenes with ResNet-50
- Runs at 45 FPS
- 64% higher mode diversity score than standard diffusion policy
- Designed to slot into existing perception stacks
- CVPR 2025 Highlight; pretrained weights on Hugging Face
Caveats
- The README keeps architectural specifics high-level; the exact truncation mechanism is left to the paper.
- Public evidence is simulation-based (NAVSIM and nuScenes); the real-world demo video is qualitative and lacks published metrics.
Verdict Grab it if you want a research-grade generative driving policy that won’t murder your frame budget. Look elsewhere if you need battle-tested, real-world validation beyond benchmark leaderboards.
Frequently asked
- What is hustvl/DiffusionDrive?
- It speeds up diffusion policies by 10× so they can finally run real-time end-to-end autonomous driving in dynamic traffic.
- Is DiffusionDrive open source?
- Yes — hustvl/DiffusionDrive is open source, released under the MIT license.
- What language is DiffusionDrive written in?
- hustvl/DiffusionDrive is primarily written in Python.
- How popular is DiffusionDrive?
- hustvl/DiffusionDrive has 1.4k stars on GitHub.
- Where can I find DiffusionDrive?
- hustvl/DiffusionDrive is on GitHub at https://github.com/hustvl/DiffusionDrive.