hamuchiwa/AutoRCCar
A three-device stack that makes an RC car self-drive
It exists to split autonomous driving across three devices: a Pi for eyes, a computer for a brain, and an Arduino for hands.
Not currently ranked — collecting fresh signals.
star history
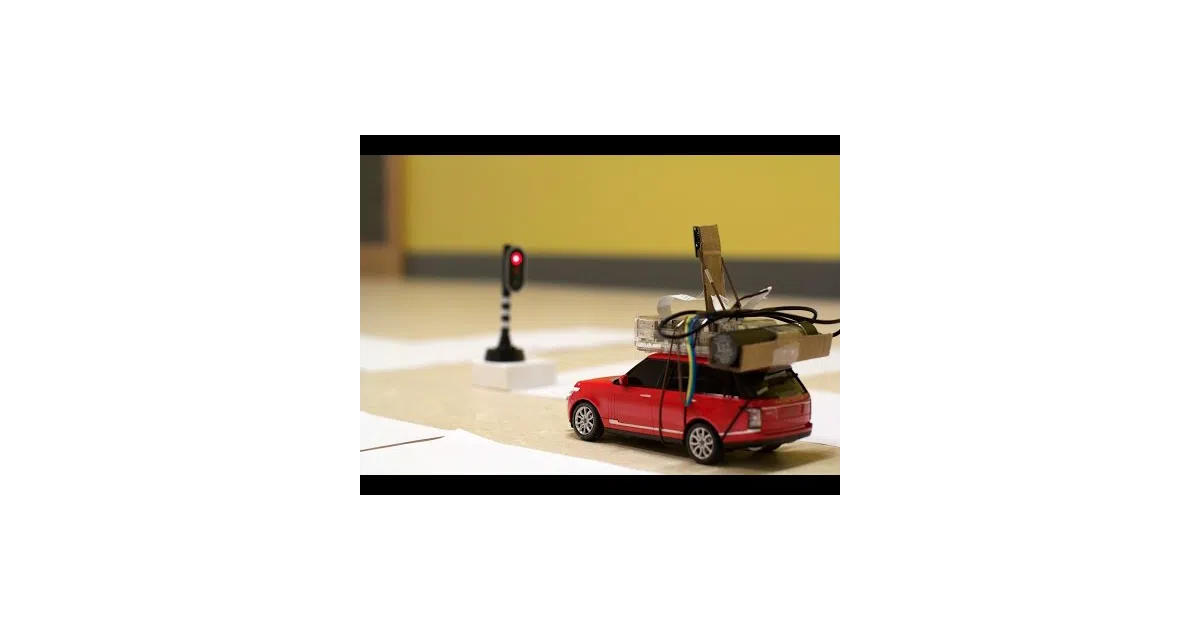
What it does AutoRCCar turns a standard RC car into an autonomous vehicle by mounting a Raspberry Pi, camera, and ultrasonic sensor on the chassis. The Pi streams grayscale frames and distance readings to a host computer over Wi-Fi; the computer runs a neural network to predict steering angles, uses OpenCV Haar cascades to spot stop signs and traffic lights, and relays commands to an Arduino that drives the motors.
The interesting bit The architecture is deliberately top-heavy: the Raspberry Pi is strictly a sensor gateway, while a host computer handles all neural-network inference and object detection before relaying commands to the Arduino. It is a time-capsule of mid-2010s computer vision, complete with chessboard camera calibration and manually collected training data gathered by keyboard tele-operation.
Key highlights
- Three-tier hardware split: Pi for sensing, computer for inference, Arduino for actuation
- Training data is collected by driving with arrow keys; frames are saved only during active keypresses
- Ships with pre-trained Haar cascade classifiers for stop signs and traffic lights in
cascade_xml - Optional Pi camera calibration using chessboard images to correct lens distortion
- Includes
rc_driver_nn_only.py, a stripped-down mode that drops object detection for pure end-to-end steering
Caveats
- The stack is explicitly pinned to Python 3 and OpenCV 3, so expect some archaeology when adapting to modern environments
- Object detection relies on classical Haar cascades rather than contemporary deep-learning detectors
- No latency, frame-rate, or accuracy benchmarks are provided in the documentation
Verdict Worth a weekend if you have an old RC car and curiosity about classical split-architecture autonomy. Not a useful foundation if you need modern, edge-optimized self-driving code.
Frequently asked
- What is hamuchiwa/AutoRCCar?
- It exists to split autonomous driving across three devices: a Pi for eyes, a computer for a brain, and an Arduino for hands.
- Is AutoRCCar open source?
- Yes — hamuchiwa/AutoRCCar is open source, released under the BSD-2-Clause license.
- What language is AutoRCCar written in?
- hamuchiwa/AutoRCCar is primarily written in Python.
- How popular is AutoRCCar?
- hamuchiwa/AutoRCCar has 3.3k stars on GitHub.
- Where can I find AutoRCCar?
- hamuchiwa/AutoRCCar is on GitHub at https://github.com/hamuchiwa/AutoRCCar.