ZikangZhou/HiVT
Teaching transformers to predict traffic chaos
HiVT is the official CVPR 2022 code that predicts multi-agent motion on Argoverse 1.1 using a hierarchical vector transformer.
Not currently ranked — collecting fresh signals.
star history
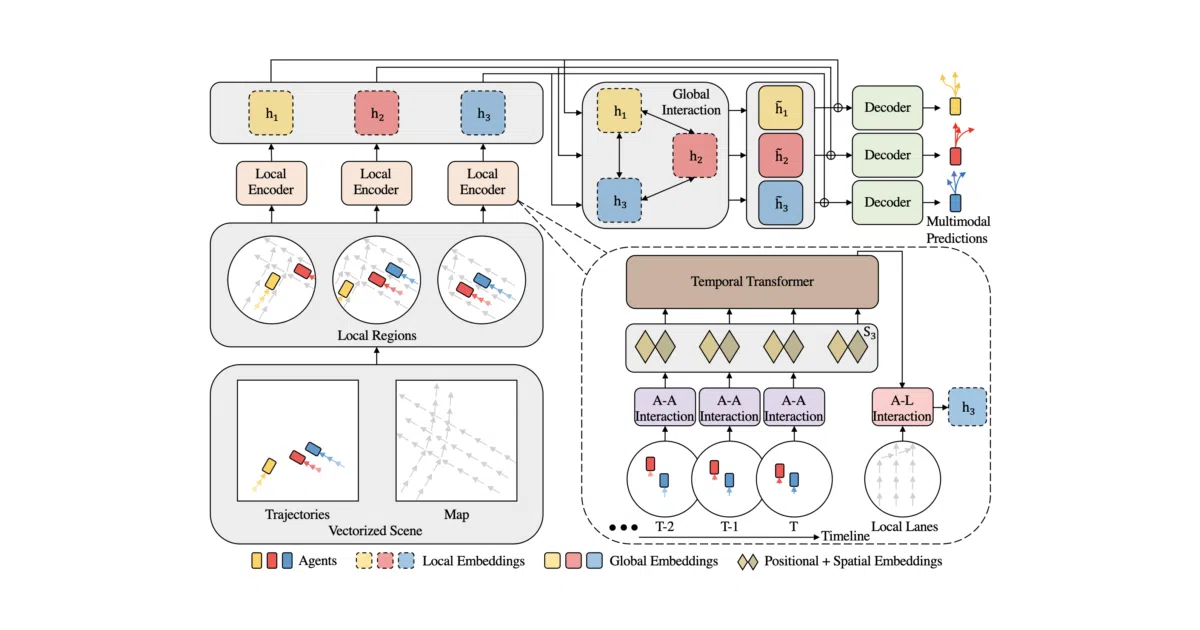
What it does HiVT is a hierarchical vector transformer for multi-agent motion prediction, published at CVPR 2022. It targets the Argoverse 1.1 motion forecasting benchmark, and the repository provides both HiVT-64 and HiVT-128 variants along with pretrained checkpoints and validation metrics.
The interesting bit As the name suggests, HiVT is a transformer that works on vector representations, using a hierarchical structure to reason over multiple agents at once. The README reports a minFDE of 0.97 and a miss rate of 0.09 for the 128-dimensional variant on Argoverse validation.
Key highlights
- Official CVPR 2022 implementation with pretrained HiVT-64 and HiVT-128 checkpoints.
- Reports minADE 0.66, minFDE 0.97, and MR 0.09 on Argoverse 1.1 validation for the larger model.
- Built on PyTorch Lightning, PyTorch Geometric, and PyTorch 1.8.
- Expect roughly 3.5 hours of initial data preprocessing and 35–40 minutes per training epoch on an RTX 2080 Ti.
Caveats
- Dependency versions are pinned to PyTorch 1.8.0, PyTorch Geometric 1.7.2, and PyTorch Lightning 1.5.2, which may conflict with modern CUDA stacks.
- Hard-locked to the Argoverse 1.1 dataset; no other benchmarks are mentioned.
- First-time preprocessing takes roughly 3.5 hours before the first training step.
Verdict Worth cloning if you need a reproducible CVPR 2022 baseline or want to study transformer architectures for motion prediction. Skip it if you need a maintained framework that runs on current PyTorch releases without dependency archaeology.
Frequently asked
- What is ZikangZhou/HiVT?
- HiVT is the official CVPR 2022 code that predicts multi-agent motion on Argoverse 1.1 using a hierarchical vector transformer.
- Is HiVT open source?
- Yes — ZikangZhou/HiVT is open source, released under the Apache-2.0 license.
- What language is HiVT written in?
- ZikangZhou/HiVT is primarily written in Python.
- How popular is HiVT?
- ZikangZhou/HiVT has 744 stars on GitHub.
- Where can I find HiVT?
- ZikangZhou/HiVT is on GitHub at https://github.com/ZikangZhou/HiVT.