Thinklab-SJTU/Awesome-LLM4AD
A Field Guide to LLMs That Want to Drive
This repo exists because the intersection of large language models and autonomous driving has become a paper firehose that nobody can read alone.
Not currently ranked — collecting fresh signals.
star history
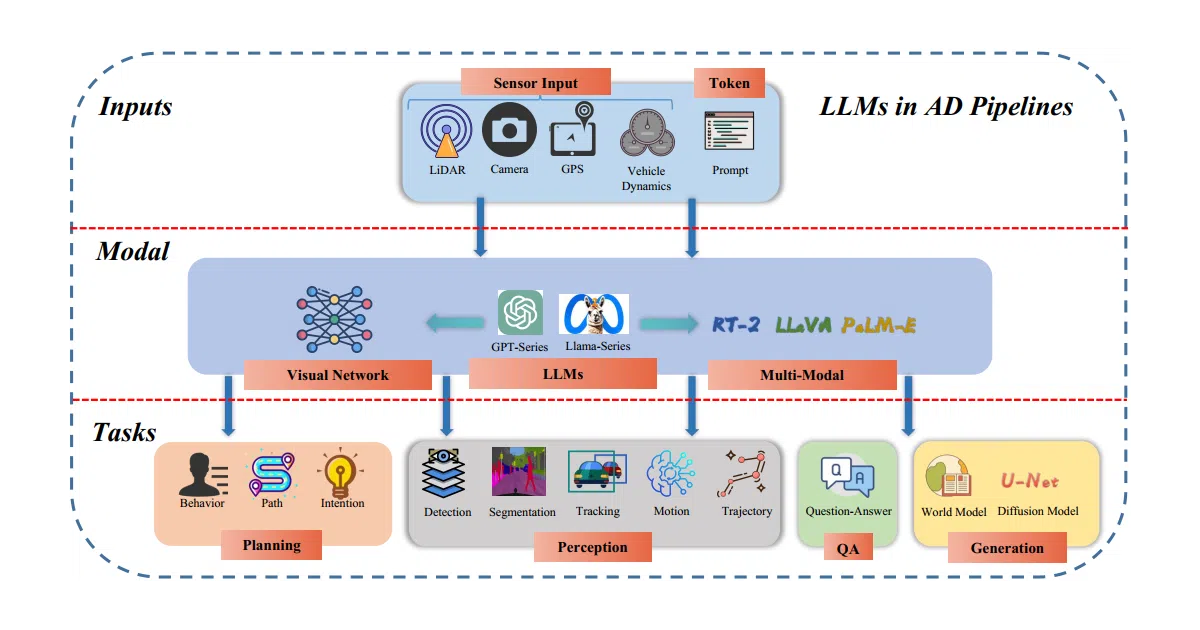
What it does This is a living bibliography maintained by SJTU’s ReThinklab that catalogs the growing pile of research applying Large Language Models, Vision-Language Models, and Vision-Language-Action models to autonomous driving. Papers are sorted into pragmatic buckets—planning, perception, question answering, and generation—and each entry comes with a structured summary, author list, publication date, task tags, and links to datasets or code. It is essentially a crowdsourceable literature review with a BibTeX citation attached.
The interesting bit The maintainers force a rigid reporting format on every entry, making authors declare their task, dataset, and claimed contribution in the same layout. That discipline keeps the list scannable despite the field’s fondness for acronyms like VLA4AD. The repository also serves as the companion index to an arXiv survey paper, so it functions as both a reading list and a citable reference.
Key highlights
- Covers the full LLM4AD spectrum: LLMs, VLMs, VLAs, and world models for driving.
- Entries are tagged by task and linked to standard datasets such as
nuScenes,NAVSIM, andBench2Drive. - Each paper entry includes authors, publish date, code or project page, and a brief summary.
- Tied to an arXiv survey paper for deeper background reading.
- Accepts community submissions via pull request and maintains direct contact emails for contributions.
Caveats
- This is a curated index, not a software project; there is no installable code or reproducible benchmark suite here.
- Several recent entries list publication dates in 2026, which suggests either typos or aggressive preprint indexing.
- Quality control is limited to curation; state-of-the-art claims are repeated as-is from the original papers.
Verdict Worth bookmarking if you are a researcher or engineer trying to stay current at the LLM and autonomous-driving intersection without drowning in conference proceedings. Ignore it if you need a ready-to-run driving stack or official reference implementations.
Frequently asked
- What is Thinklab-SJTU/Awesome-LLM4AD?
- This repo exists because the intersection of large language models and autonomous driving has become a paper firehose that nobody can read alone.
- Is Awesome-LLM4AD open source?
- Yes — Thinklab-SJTU/Awesome-LLM4AD is open source, released under the Apache-2.0 license.
- How popular is Awesome-LLM4AD?
- Thinklab-SJTU/Awesome-LLM4AD has 1.9k stars on GitHub.
- Where can I find Awesome-LLM4AD?
- Thinklab-SJTU/Awesome-LLM4AD is on GitHub at https://github.com/Thinklab-SJTU/Awesome-LLM4AD.