SpectacularAI/HybVIO
A research VIO system that admits it's messy
Published so other researchers can verify WACV 2022 results, not so you can paste it into a shipping product.
Not currently ranked — collecting fresh signals.
star history
What it does
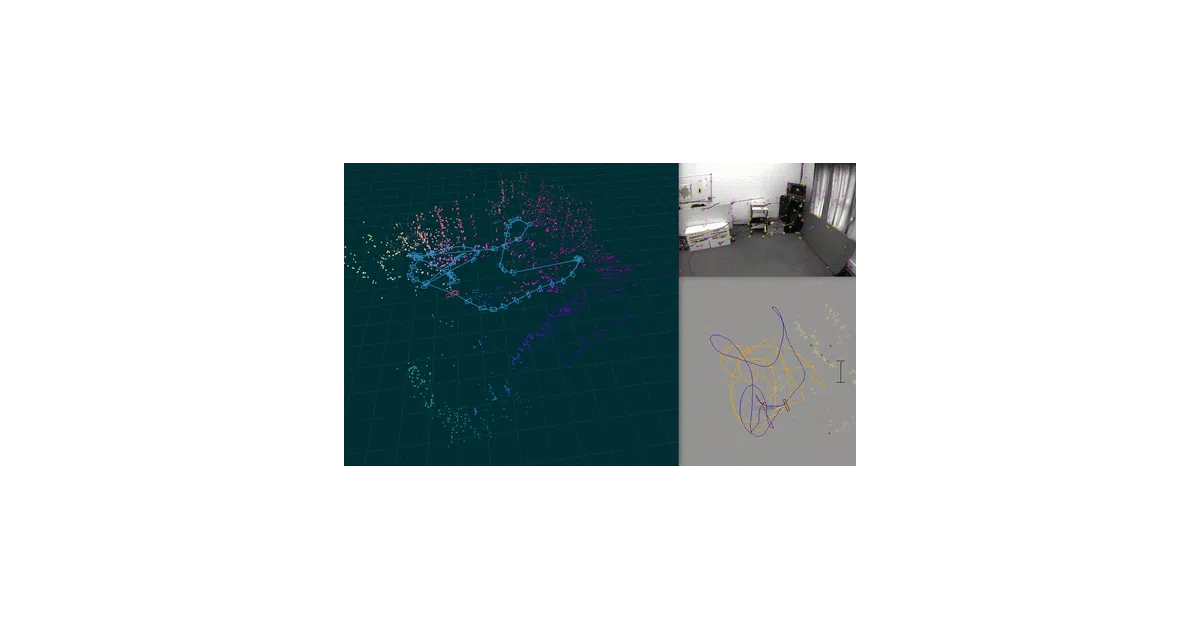
HybVIO is a C++ visual-inertial odometry system with an optional SLAM module. It ingests camera and IMU data to track pose in real time, and ships with loaders for EuRoC, TUM, and SenseTime datasets. The authors released it primarily so others can reproduce the results from their 2022 WACV paper and use it as a benchmark baseline.
The interesting bit
The README is unusually candid: it explicitly warns the code is “not intended for production use” and “does not represent a particularly clean or simple way” of implementing the methods. That honesty is refreshing in a field where research repos often pretend to be enterprise-ready.
Key highlights
- Optional SLAM module with 3D visualization support
- Real-time pose and video visualizations, plus optional GPU acceleration
- Stereo camera support
- Extensive parameter flags in
codegen/parameter_definitions.c, many unused but left in for other research scenarios - GPLv3 with commercial licensing available through Spectacular AI
Caveats
- The authors explicitly warn this is not production-ready code and that the implementation is neither clean nor simple
- The codebase contains numerous feature flags and parameters that are unused by HybVIO itself, adding noise for adopters
- The README includes a troubleshooting section specifically for disabling GPU visualizations and acceleration when they fail to build
Verdict Grab it if you need a reproducible VIO/VISLAM baseline or want to cross-check the WACV 2022 numbers; skip it if you are looking for a polished, drop-in navigation library for a product.
Frequently asked
- What is SpectacularAI/HybVIO?
- Published so other researchers can verify WACV 2022 results, not so you can paste it into a shipping product.
- Is HybVIO open source?
- Yes — SpectacularAI/HybVIO is open source, released under the GPL-3.0 license.
- What language is HybVIO written in?
- SpectacularAI/HybVIO is primarily written in C++.
- How popular is HybVIO?
- SpectacularAI/HybVIO has 545 stars on GitHub.
- Where can I find HybVIO?
- SpectacularAI/HybVIO is on GitHub at https://github.com/SpectacularAI/HybVIO.