Robbyant/lingbot-map
Real-time 3D mapping without the per-scene training ritual
It reconstructs 3D scenes from streaming video in real time without per-scene optimization, using a feed-forward transformer that remembers trajectory and corrects drift as it goes.
Velocity · 7d
+1071
★ / day
Trend
↗accelerating
star history
What it does
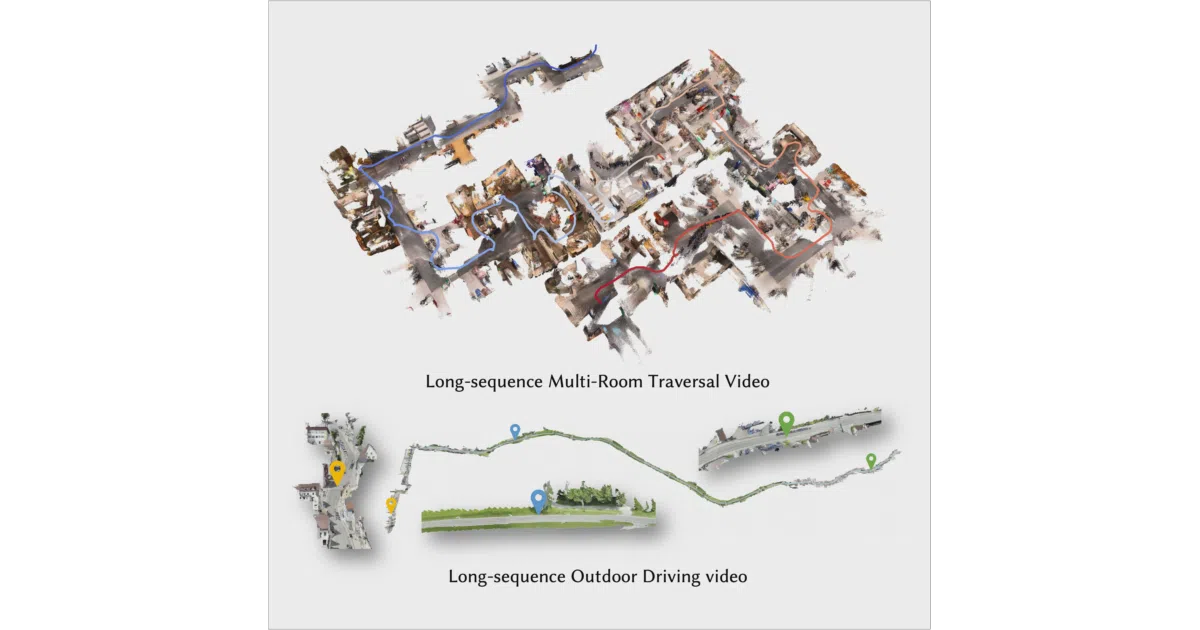
LingBot-Map ingests a stream of RGB frames and emits a 3D reconstruction on the fly. It is a feed-forward foundation model, so it skips the hours-long per-scene training that NeRFs and Gaussian splatting usually require. For short sequences it launches an interactive browser viewer; for very long walkthroughs it falls back to an offline batch renderer.
The interesting bit
The architecture treats streaming reconstruction like a language model: it uses paged KV-cache attention, anchor contexts, and a pose-reference window to maintain trajectory memory and correct long-range drift. This lets it process over 10,000 frames at roughly 20 FPS on 518×378 video without iterative refinement. The README notes a hard boundary—performance degrades if the KV cache exceeds 320 views unless you apply keyframe subsampling or switch to windowed mode.
Key highlights
- Feed-forward inference: no scene-specific training, just a pretrained checkpoint and a folder of images.
- Long-sequence support: handles 10,000+ frames via keyframe intervals and a sliding-window mode for sequences beyond 3,000 frames.
- Built-in drift correction: unifies coordinate grounding, geometric cues, and trajectory memory in a single transformer pass.
- Hardware-aware attention: uses FlashInfer for paged KV-cache attention, falling back to PyTorch SDPA if unavailable.
- Released benchmarks: evaluation scripts are up for KITTI and Oxford Spires, with more datasets on the way.
Caveats
- The model’s effective range is bounded by the longest distance seen during training; beyond that, poses can collapse unless you enable windowed inference.
- Interactive visualization tops out for very long sequences—the 25,000-frame demo requires the offline rendering pipeline instead of the live viewer.
- Several benchmarks (TUM-D, 7-scenes, ETH3D, Tanks and Temples, NRGBD) and outdoor aerial demos are still listed as pending in the project TODO.
Verdict
Worth a look if you need fast, pretrained 3D reconstruction for robotics, AR, or video analysis without tuning a radiance field. Skip it if you need guaranteed metric accuracy beyond the training distribution or a fully polished evaluation against every classic SLAM benchmark.
Frequently asked
- What is Robbyant/lingbot-map?
- It reconstructs 3D scenes from streaming video in real time without per-scene optimization, using a feed-forward transformer that remembers trajectory and corrects drift as it goes.
- Is lingbot-map open source?
- Yes — Robbyant/lingbot-map is open source, released under the Apache-2.0 license.
- What language is lingbot-map written in?
- Robbyant/lingbot-map is primarily written in Python.
- How popular is lingbot-map?
- Robbyant/lingbot-map has 14.7k stars on GitHub and is currently accelerating.
- Where can I find lingbot-map?
- Robbyant/lingbot-map is on GitHub at https://github.com/Robbyant/lingbot-map.