NVlabs/Deep_Object_Pose
Robotic grasping starts with a plain old RGB photo
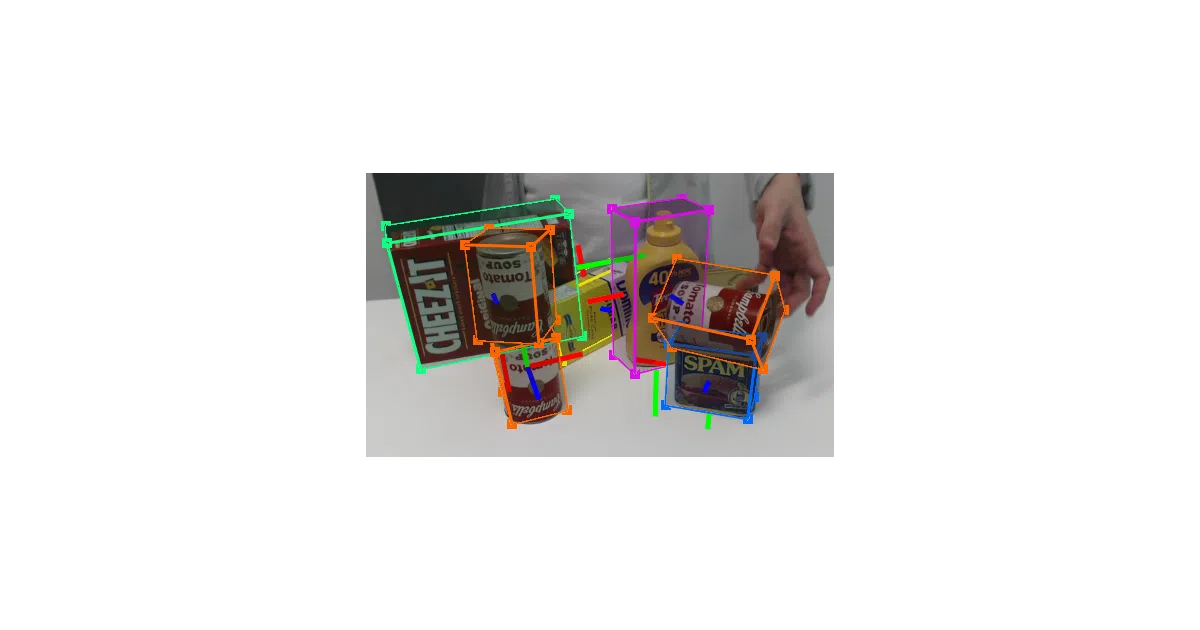
DOPE estimates the full 3D position and orientation of known household objects from a single color image, giving robots the spatial awareness they need to grasp.
Not currently ranked — collecting fresh signals.
star history
What it does
Deep Object Pose Estimation (DOPE) detects specific, known objects in a scene and regresses their six-degree-of-freedom pose from an ordinary RGB camera feed. The repository ships training scripts, inference code, numerical evaluation, and synthetic data generation, plus a ROS1 Noetic node for live USB-camera inference. If you need hardware-accelerated ROS2, NVIDIA points to a separate Isaac ROS package.
The interesting bit
The repository includes synthetic data generation alongside training and inference, documented in a single walkthrough. That is the quietly useful part: it lets you manufacture labeled training scenes rather than hand-annotating real-world images.
Key highlights
- 6-DoF pose estimation for known objects using only RGB input
- Bundled support for YCB and HOPE household-object datasets with pre-trained weights
- Complete loop: synthetic data generation, training, inference, and evaluation
- Live ROS1 Noetic node for USB camera streams
- External Isaac ROS2 node available for Jetson and desktop GPU acceleration
Caveats
- The original CoRL 2018 code is archived in the repo but no longer maintained
- ROS2 inference is not included here; it requires the separate NVIDIA Isaac ROS project
- The README displays a CC BY-NC-SA 4.0 badge while the license text refers to the NVIDIA Source Code License, so the actual terms need a second look
Verdict
Grab it if you need a proven, end-to-end pipeline for known-object pose estimation in a manipulation stack. Look elsewhere if you want open-vocabulary detection or an all-in-one ROS2 solution.
Frequently asked
- What is NVlabs/Deep_Object_Pose?
- DOPE estimates the full 3D position and orientation of known household objects from a single color image, giving robots the spatial awareness they need to grasp.
- Is Deep_Object_Pose open source?
- Yes — NVlabs/Deep_Object_Pose is an open-source project tracked on heatdrop.
- What language is Deep_Object_Pose written in?
- NVlabs/Deep_Object_Pose is primarily written in Python.
- How popular is Deep_Object_Pose?
- NVlabs/Deep_Object_Pose has 1.2k stars on GitHub.
- Where can I find Deep_Object_Pose?
- NVlabs/Deep_Object_Pose is on GitHub at https://github.com/NVlabs/Deep_Object_Pose.