vikashplus/robohive
One physics engine, five robot suites, zero API drama
RoboHive wraps MuJoCo environments in a standard Gym interface so you can stop rewriting glue code between your robot tasks and RL frameworks.
Not currently ranked — collecting fresh signals.
star history
What it does
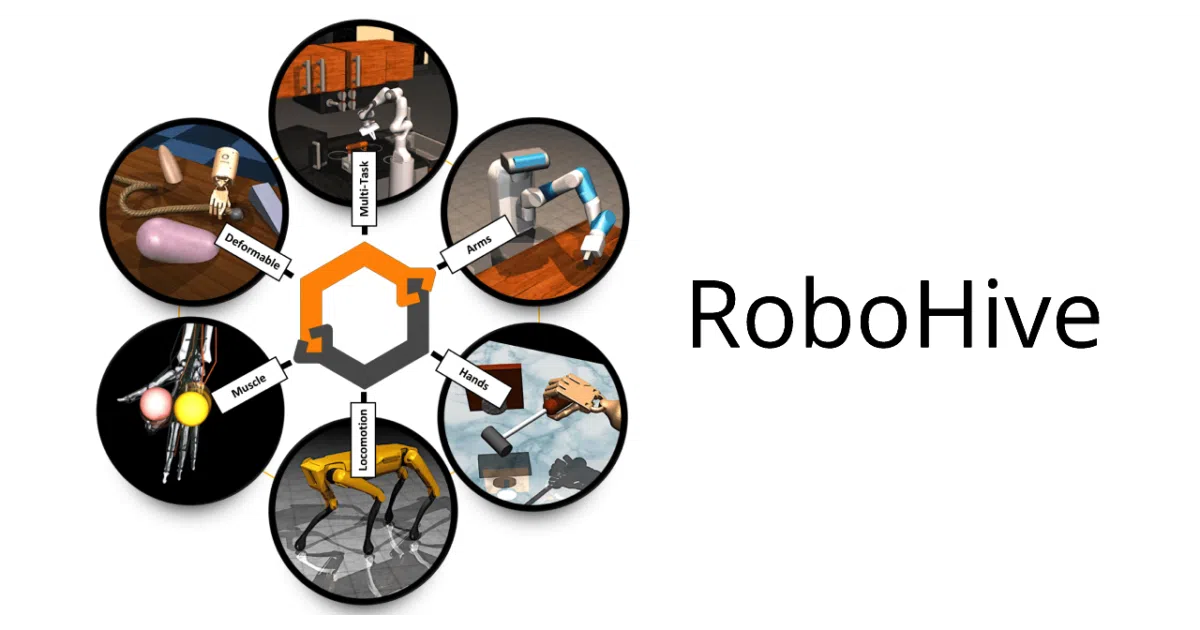
RoboHive is a collection of MuJoCo-based robot simulation environments exposed through the OpenAI-Gym API. It bundles dexterous hand manipulation, arm control, musculoskeletal models, and multi-task benchmarks into one installable package (pip install robohive). The pitch: plug any gym-compatible RL framework—Stable Baselines, RLlib, TorchRL—into any of the included suites without rewriting environment wrappers.
The interesting bit The musculoskeletal angle is genuinely unusual. The Myo-Suite and MyoDM-Suite model biological motor control rather than standard jointed robots, which opens a different research lane than yet another Franka arm benchmark. The project also originated the widely-used Adroit dexterous manipulation benchmarks.
Key highlights
- Five environment suites: Hand-Manipulation, Arm-Manipulation, Myo (musculoskeletal control), MyoDM (musculoskeletal dexterous manipulation), and MultiTask (includes RelayKitchen)
- TCDM Suite marked WIP; ROBEL Suite listed as “Coming soon”
- Supports visual encoders: R3M, RRL, VC (requires separate setup)
- One-command initialization via
robohive_init - Colab demo available
Caveats
- Two suites are incomplete or pending (TCDM WIP, ROBEL “Coming soon”)
- Visual encoder dependencies are not included in the base pip install
- Documentation lives in a GitHub wiki; depth unclear from README alone
Verdict Worth a look if you’re doing robot learning in MuJoCo and want consolidated, pre-wrapped benchmarks. Skip if you need real hardware integration now—ROBEL isn’t here yet, and the framework is simulation-only.
Frequently asked
- What is vikashplus/robohive?
- RoboHive wraps MuJoCo environments in a standard Gym interface so you can stop rewriting glue code between your robot tasks and RL frameworks.
- Is robohive open source?
- Yes — vikashplus/robohive is open source, released under the Apache-2.0 license.
- What language is robohive written in?
- vikashplus/robohive is primarily written in Python.
- How popular is robohive?
- vikashplus/robohive has 629 stars on GitHub.
- Where can I find robohive?
- vikashplus/robohive is on GitHub at https://github.com/vikashplus/robohive.