enactic/openarm
Seven joints, $6.5K, and a standardized lab cell
OpenArm is an open-source 7DOF humanoid arm designed to make contact-rich physical AI research affordable and reproducible across labs.
Not currently ranked — collecting fresh signals.
star history
What it does
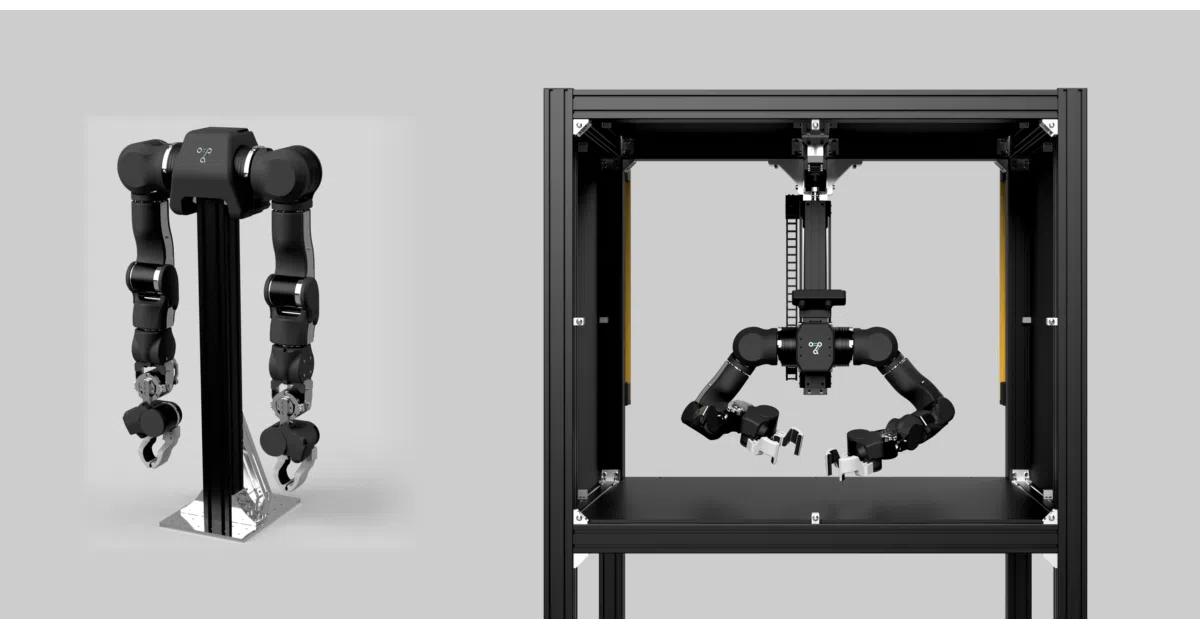
OpenArm is a 7-degree-of-freedom humanoid arm built for physical AI research—teleoperation, imitation learning, simulation, and real-world data collection in contact-rich tasks. It prioritizes high backdrivability and compliance so it won’t injure a nearby human, while still handling practical payloads. A complete bimanual system costs $6,500 USD and is available assembled or as a DIY kit from verified manufacturers.
The interesting bit
The project ships an “OpenArm Cell,” a standardized evaluation cage with fixed background, lighting, and camera placement. That means an experiment in Tokyo should look identical to one in Berlin, sidestepping the usual “works on my lab bench” reproducibility headache. The ecosystem is also unusually complete for open hardware: CAD files under CERN-OHL-S-2.0, plus URDF descriptions, CAN motor control, ROS2 packages, bilateral teleoperation, MuJoCo and Isaac Lab simulation, dataset tools, and Dora dataflow nodes.
Key highlights
- 7DOF humanoid arm with human-scale proportions and high backdrivability for safe contact-rich work
- $6,500 USD for a complete bimanual system, sold assembled or DIY via verified manufacturers
- OpenArm Cell standardizes lighting, background, and camera placement for reproducible global research
- Full stack: hardware CAD (CERN-OHL-S-2.0), URDF/xacro, CAN control, ROS2 and bilateral teleoperation packages, plus MuJoCo, Isaac Lab, dataset, and Dora nodes
Caveats
- The README admits the project is in “continuous development,” so APIs and hardware revisions may shift underfoot.
- Specific payload limits, torque curves, and joint ranges aren’t listed in the README; you’ll need the hardware docs for hard numbers.
Verdict
Robotics researchers and hardware hackers looking for an affordable, reproducible platform for contact-rich manipulation should take a close look. If you need a turn-key industrial arm with a vendor warranty, this is not your robot.
Frequently asked
- What is enactic/openarm?
- OpenArm is an open-source 7DOF humanoid arm designed to make contact-rich physical AI research affordable and reproducible across labs.
- Is openarm open source?
- Yes — enactic/openarm is open source, released under the Apache-2.0 license.
- What language is openarm written in?
- enactic/openarm is primarily written in MDX.
- How popular is openarm?
- enactic/openarm has 2.8k stars on GitHub.
- Where can I find openarm?
- enactic/openarm is on GitHub at https://github.com/enactic/openarm.